8. Example communication
8.1. ASYNC communication
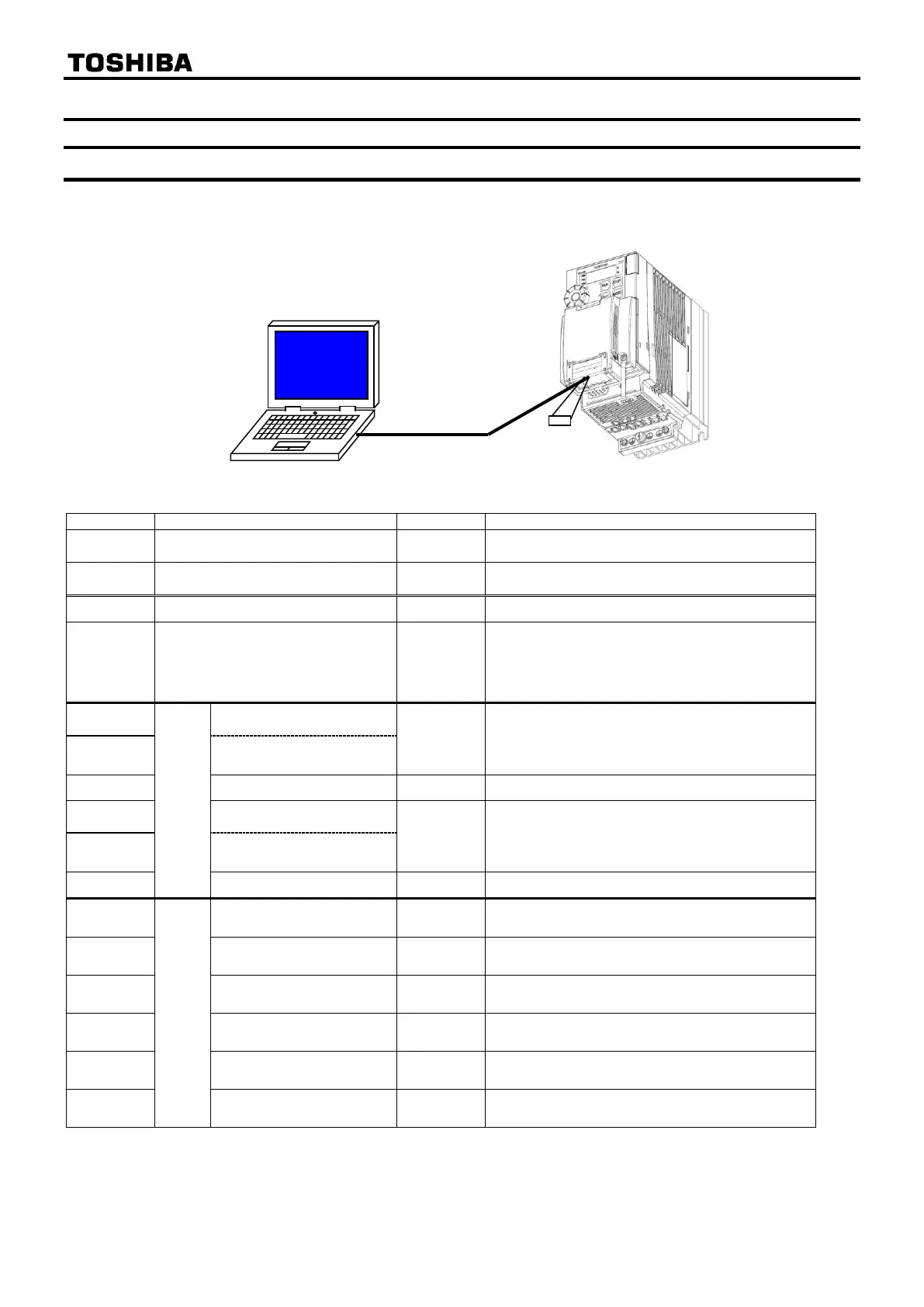
This is an example communication to control run/stop the drive and set frequency command.
Frequency command selection
Board rate
0: 20k 4: 500k
1: 50k 5: 800k
2: 125k 6: 1M
3: 250k
Receive: COB-ID entry
High word
0x1400 subidx 01
If the setting is default setting, COB-ID is
below value.
COB-ID = 0x00000200+Node-ID
0x1400 subidx 02 Asynchronous
Transmit :COB-ID
High word
0x1800 subidx 01
If the setting is default setting, COB-ID is
below value.
COB-ID = 0x00000180+Node-ID
0x1800 subidx 02 Asynchronous
0x1600 subidx 00 Receive PDO1 assignment:
Number of objects assigned
0x1600 subidx 01 Command Index No.
0x6040: Controlword
0x1600 subidx 02 Command Index No.
0x6042: vl target velocity
0x1A00 subidx 00 Transmit PDO1
assignment: Number of objects assigned
0x1A00 subidx 01 Monitor Index No.
0x6041: vl Statusword
0x1A00 subidx 02 Monitor Index No.
0x6044: vl velocity actual value
 Loading...
Loading...












