All rights reserved 122 Servicemanual_UR10_en_3.1.3
7. Packing of robot
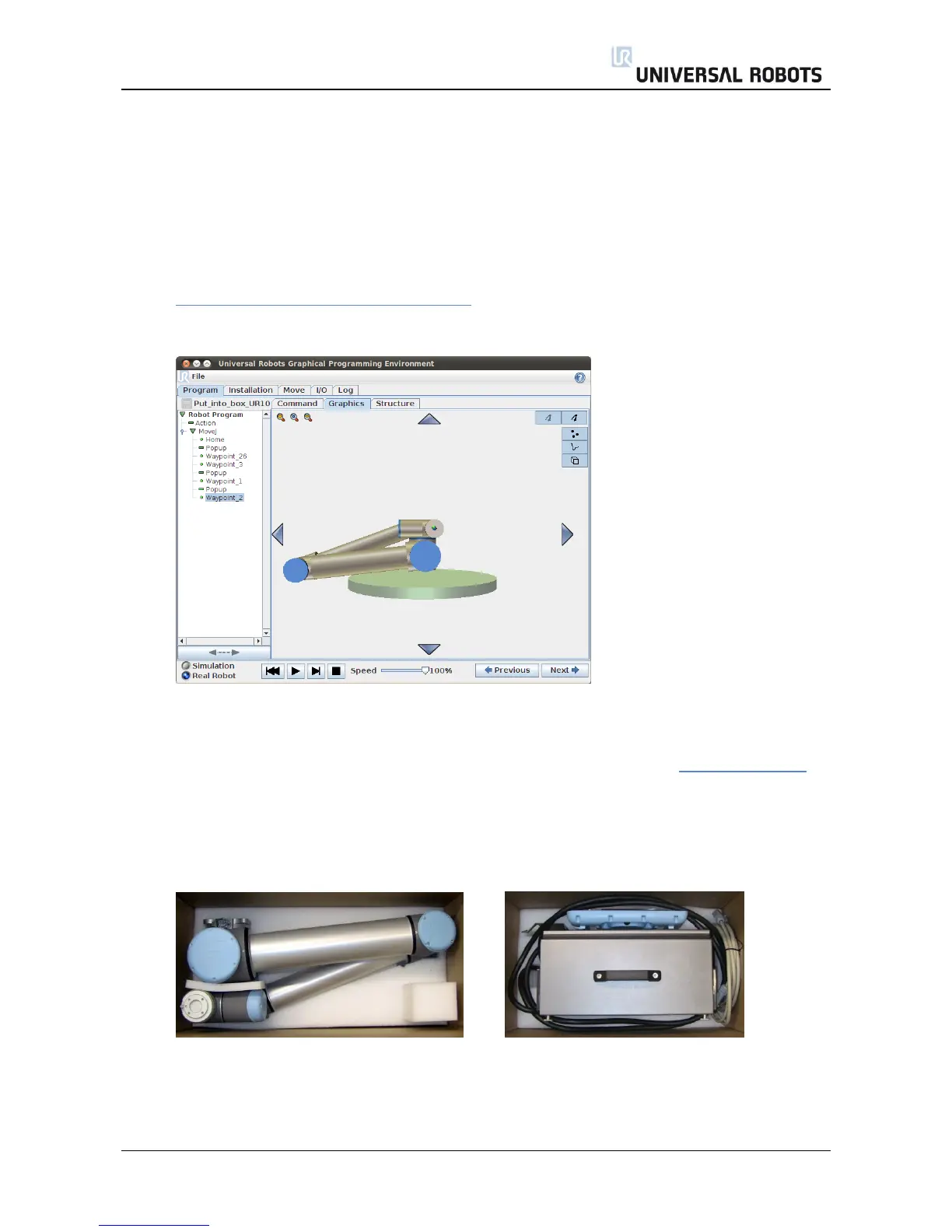
Packing of robot and controller box for shipment
Remove any external tooling and external electrical connections.
Download the Put_Into_Box program to a USB stick. Download it from:
http://www.universal-robots.com/support/
Load program Put_into_box_ur10.urp and follow instructions while removing mounting bolts.
While robot folds together, hold a piece of bubble wrap between Shoulder joint and wrists.
Note: If robot cannot run or power is not available, it is possible to manually release the brakes for
each joint individually and pack the robot accordingly. For brake release, see 3.1.3 Brake release
Power down, disconnect power and disconnect robot arm from controller.
Pack robot arm and Controller box in designated boxes. Make sure the robot arm is orientated
correct in the box.

 Loading...
Loading...









