All rights reserved 13 Servicemanual_UR10_en_3.1.3
3.1.4 General guidance to separate joint from counterpart
Disassemble:
1. Check if the necessary tools and documentation are available before starting a repair.
a. Service kit with torque tools, ESD Wristband, etc.
b. Thoroughly read and understand this guide.
2. Move the robot to a comfortable position for disassembly or if necessary dismount entire robot
arm from work cell and place on a solid surface.
3. Shut down the controller.
4. Remove blue lid.
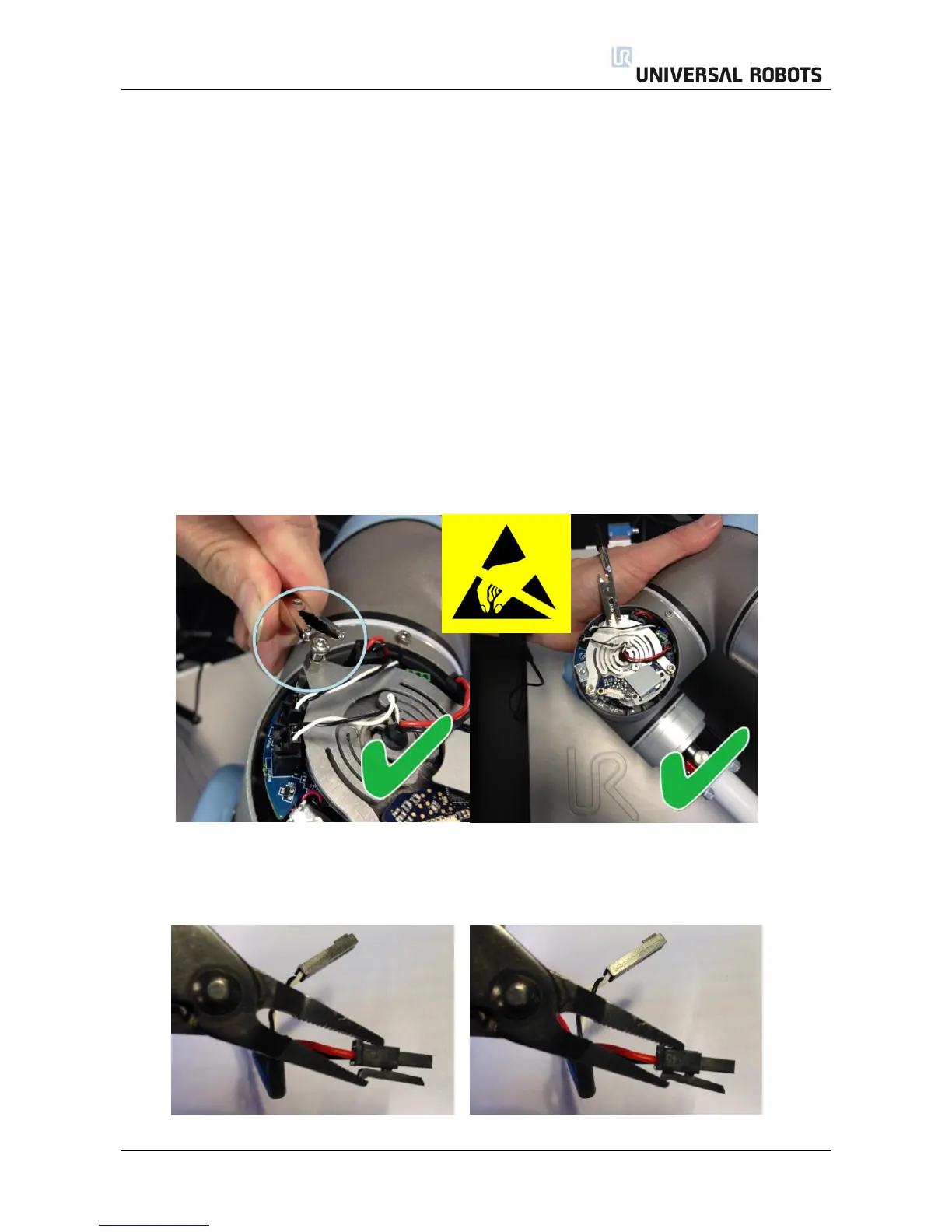
5. Reattach one of the screws from the blue lids, in order to connect an alligator Clip on the ESD
wristband as shown below.
6. Gently unplug the cable connectors without bending the printed circuit board.
The power supply connector for the size 1 has a lock that has to be engaged before it is pulled out
of the printed circuit board.

 Loading...
Loading...









