上海维宏电子科技股份有限公司
Weihong Electronic Technology Co., Ltd.
Specialized, Concentrated, Focused - 69 -
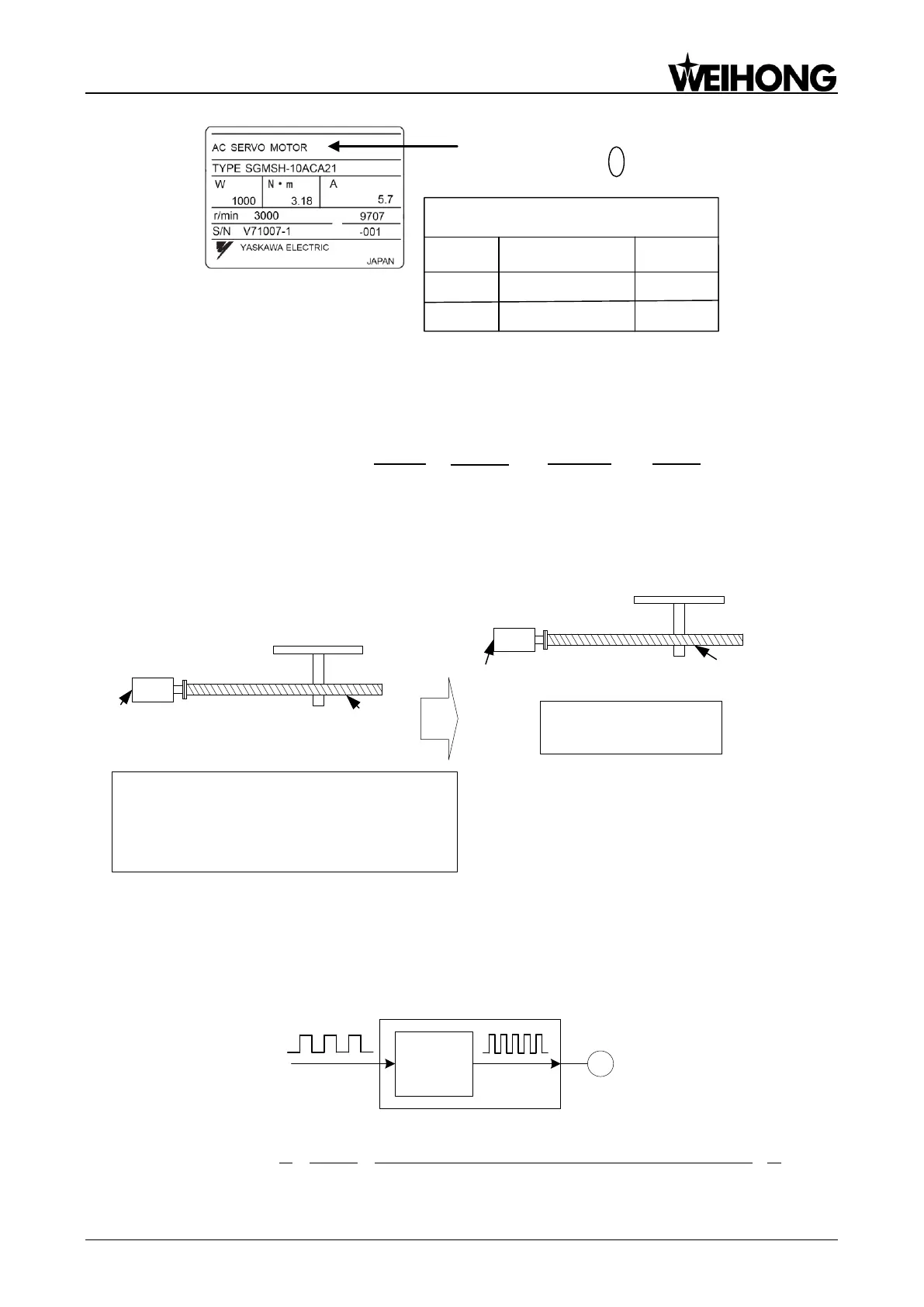
Motor Type:
TYPE SGMSH-1 0 A C A 2 1
Sign Spec. Remark
2
C
17-bit absolute
17-bit increment
Standard
Standard
The 4th character:
serial encoder spec.
(The 4th character)
Fig. 5-6 Name plate of servo motor-encoder resolution
For instance: (an example of YASKAWA servo) screw pitch of a certain type of machine is 5mm,
with 17 bit encoder resolution, ―0.001mm/p‖ pulse equivalent and ―1:1‖ deceleration ratio.
Electronic gear ratio
=
=
=
The conversion of electronic gear ratio is as shown below.
Without Electronic Gear
To move workpiece 10mm
Traveling distance per revolution is 6mm,
10÷6=1.6666 revolutions
One revolution needs 2048×4 pulses
1.6666×2048×4=13653 pulses
Input 13653 command pulses.
This conversion should be done at the senior device.
Encoder pulses:
2048
Ball screw pitch:
6mm
Worktable
With Electronic Gear
To move workpiece 10mm,
since command unit is 1μm,
10mm÷1μ=10000 pulses
Mechanical conditions and
command unit should be
specified in advance.
Encoder pulses:
2048
Ball screw pitch:
6mm
Worktable
Command unit: 1μm
Fig. 5-7 Schematic conversion of electric gear ratio
5.3.3 Computing Method of Electric Gear Ratio
The setting of electronic gear ratio should be in accordance with the specification of equipment.
Electronic
gear ratio:
B/A
M
Input Command
Pulses
SGDM Servo Unit
SGDM□H
Servo Unit
Fig. 5-8 Schematic map of electronic gear ratio function
B Pn202 Encoder Pulses 4 m
Electronic Gear Ratio
A Pn203 Amount of movement per revolution of bearing axle n
 Loading...
Loading...