181
JOHNSON CONTROLS
FORM 201.21-NM1 (1223)
In cases where temperature is dropping too fast, when
temperature is within the desired control range, the
Chiller Control Board microprocessor will be required
to make decisions regarding speed changes under
conditions where the “error” and “rate” conict. For
example, the Chiller Control Board microprocessor
may elect to reduce the speed of the compressor(s) if
the error is “0” (temperature is at Setpoint), while the
rate of change of chilled liquid temperature is “negative“
(falling). The Chiller Control Board microprocessor
may also elect to hold capacity when error is “positive”
(temperature is above Setpoint, but not above Setpoint
+ CR) because the rate of change of chilled liquid is
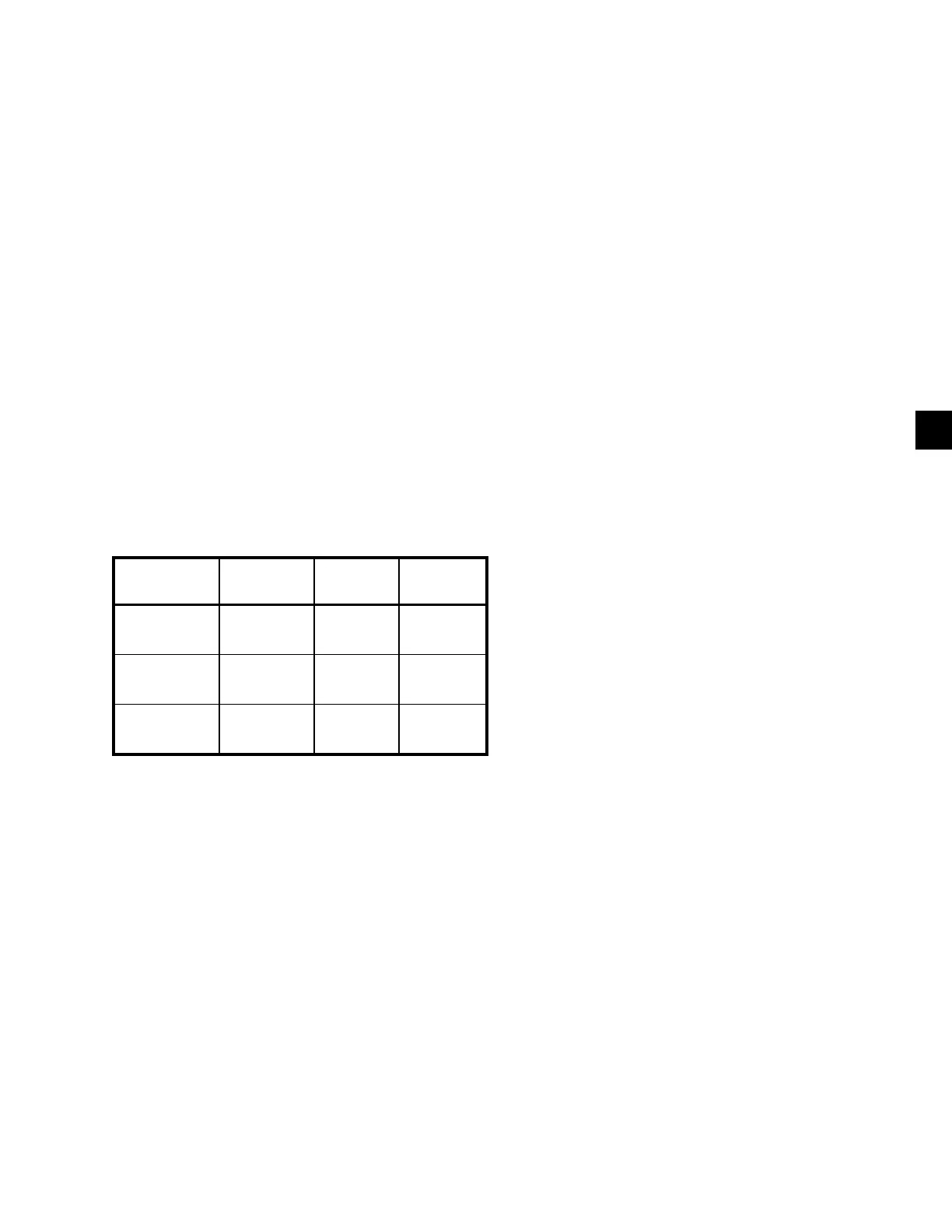
“negative” (falling). TABLE 5 illustrates these
conditions.
OPTIONAL HIGH IPLV CAPACITY CONTROL (CON'T)
(Loading/Unloading and starting additional compressors)
TABLE 5 - FUZZY LOGIC LOADING/UNLOADING
VS. ERROR
NEGATIVE
ERROR
ZERO
ERROR
POSITIVE
ERROR
NEGATIVE
RATE
UNLOAD UNLOAD HOLD
ZERO
RATE
UNLOAD HOLD HOLD
POSITIVE
RATE
HOLD LOAD LOAD
When temperature is signicantly below the Setpoint
– CR/2, the Chiller Control Board microprocessor will
reduce the speed of the compressor(s) to unload the
chiller by 2.0 Hz every 2 seconds. If temperature drops
to within 1.0°F above the Low Chilled Liquid Tempera-
ture Cutout, the Chiller Control Board microprocessor
will unload at the rate of 4.0 Hz every 2 seconds.
As the temperature rises toward Setpoint – CR, the
Chiller Control Board microprocessor’s fuzzy logic will
begin factoring in the rate of change before continuing to
unload. If the rate of change is rising too fast and there
is potential for overshoot, the Chiller Control Board
microprocessor may elect not to decrease speed.
In cases where temperature is rising too fast, when tem-
perature is within the desired control range, the Chiller
Control Board microprocessor will be required to make
decisions regarding speed changes under conditions
where the “error” and “rate” conict. For example, the
Chiller Control Board microprocessor may elect to in-
crease the speed of the compressor(s) if the error is “0”
(temperature is at Setpoint), while the rate of change
of chilled liquid temperature is “positive” (rising). The
Chiller Control Board microprocessor may also elect to
hold capacity when error is “negative” (temperature is
below Setpoint) because the rate of change of chilled
liquid is “positive” (rising). TABLE 5 illustrates these
conditions and the response from the Chiller Control
Board microprocessor.
HOT WATER STARTS
On a hot water start under "best" case conditions, as-
suming power has not been removed and the 120 sec
timer does not inhibit starting, the design of the control
algorithm for a 2 compressor High IPLV leaving chilled
liquid capacity control allows full loading of a chiller in
slightly more than 6 minutes, regardless of the number
of compressors, if all the compressors start at the same
time. This time period assumes load limiting does not
aect the loading sequence and the ambient is above
40°F.
7
 Loading...
Loading...




