InformationAction
Tightening torque: 2 Nm.
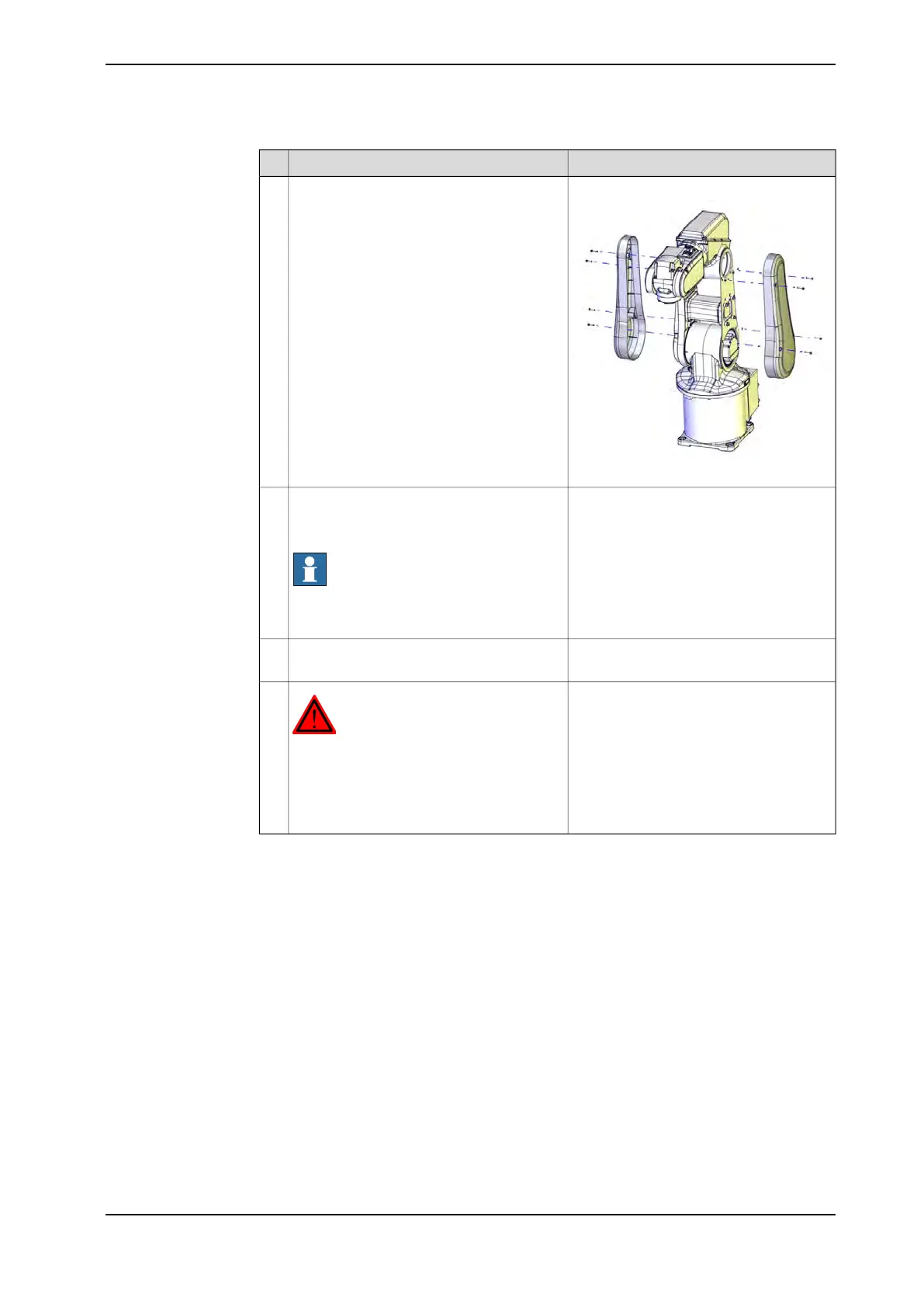
xx0900000848
Refit the lower arm covers.21
Clean Room robots: seal and paint the joints
that have been opened. See Replacing parts
on the robot on page 118
Note
After all repair work, wipe the robot free
from particles with spirit on a lint free cloth.
22
See chapter:
• Calibration on page 225.
Recalibrate the robot.23
DANGER
Make sure all safety requirements are met
when performing the first test run. These
are further detailed in the section DANGER
- First test run may cause injury or damage!
on page 47.
24
Product manual - IRB 120 201
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
4 Repair
4.7.2 Replacing axis-2 motor with gearbox
Continued

 Loading...
Loading...



