2.3.5 Setting the system parameters for a suspended or tilted robot
General
The robot is configured for mounting parallel to the floor, without tilting, on delivery.
The method for mounting the robot in a suspended (upside down) or tilted position
is basically the same as for floor mounting, but the system parameters that describe
the mounting angle (how the robot is oriented relative to the gravity) must be
redefined.
Note
With suspended installation, make sure that the gantry or corresponding structure
is rigid enough to prevent unacceptable vibrations and deflections, so that
optimum performance can be achieved.
Note
The allowed mounting positions are described in the product specification for
the robot. The requirements on the foundation are described in Requirements,
foundation on page 58.
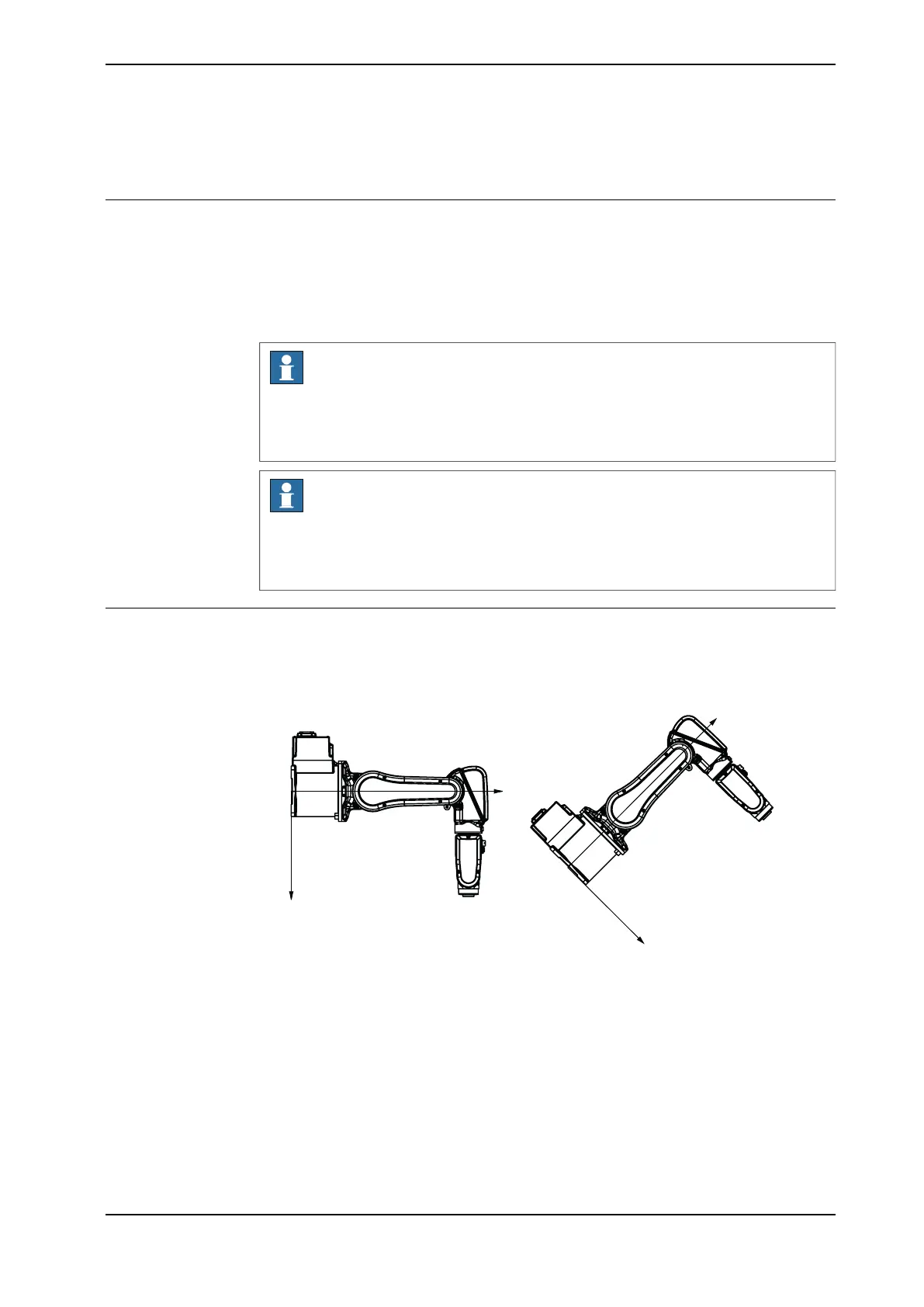
The x-direction in the base coordinate system
If the robot is wall mounted or mounted in a tilted position, it is important that the
x-direction of the robot base coordinate system points downwards, as shown in
the following figure.
xx1400000737
Continues on next page
Product manual - IRB 120 75
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
2 Installation and commissioning
2.3.5 Setting the system parameters for a suspended or tilted robot
 Loading...
Loading...




