2.6 Electrical connections
2.6.1 Robot cabling and connection points
Introduction
Connect the robot and the controller to each other after securing them to the
foundation. The lists specify which cables to use for each respective application.
Connection point locations
For information about the connection point locations, see the chapter Circuit
diagram.
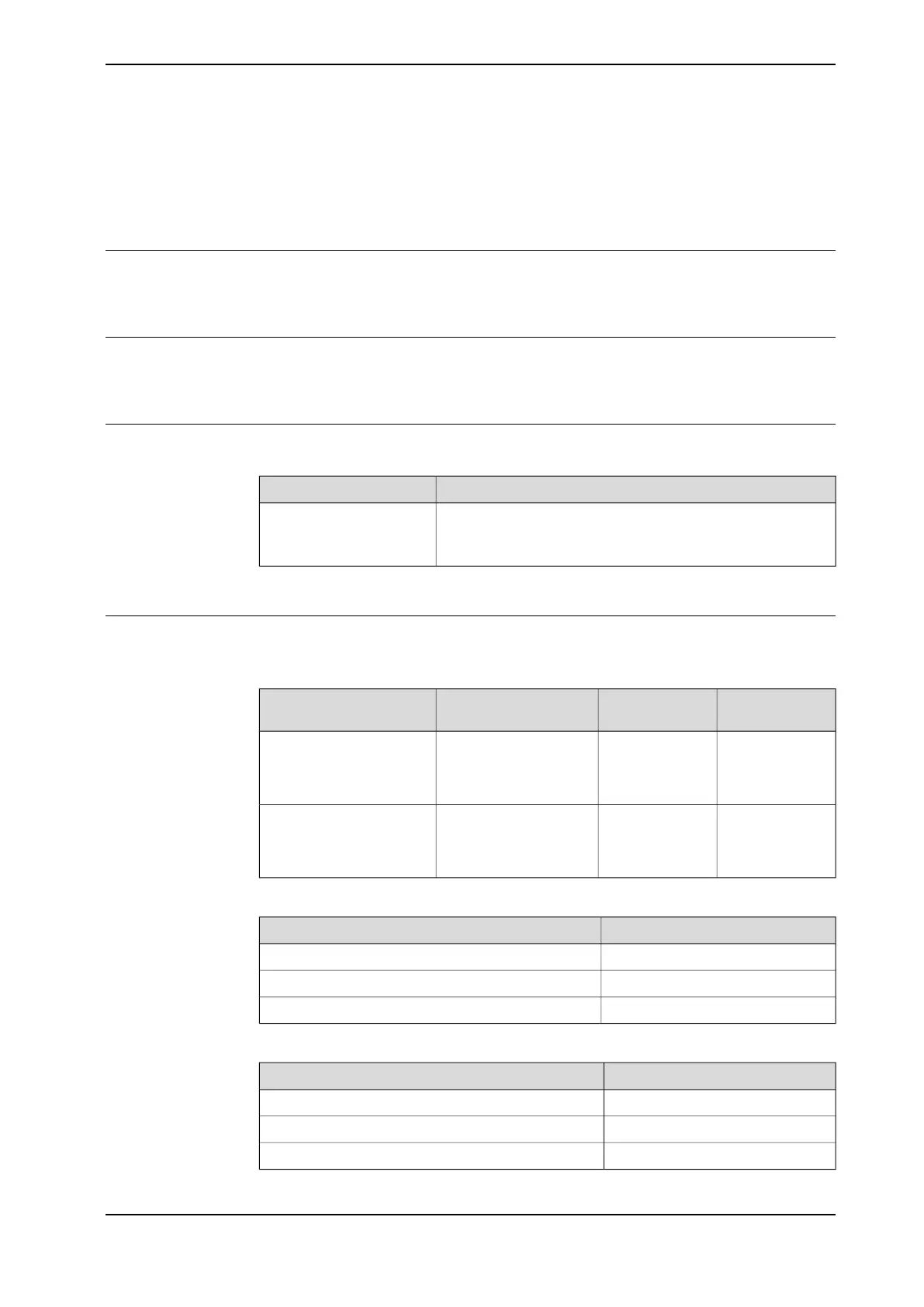
Main cable categories
All cables between the robot and controller are divided into the following categories:
DescriptionCable category
Handles power supply to, and the control of the robot’s motors
as well as feedback from the encoder interface board.
Robot cables
Specified in the table in Robot cable, power on page 85.
The cable categories are divided into sub-categories. See Robot cables on page 85.
Robot cables
The robot cable is included in the standard delivery of the robot. They are completely
pre-manufactured and ready to plug in.
Connection
point, robot
Connection
point, cabinet
DescriptionCable sub-category
R1.MPXS1Transfers drive power
from the drive units in
the control cabinet to the
robot motors
Robot cable, power
R1.SMBXS2Transfers encoder data
from and power supply
to the encoder interface
board.
Robot cable, signal
Robot cable, power
Art. no.Cable
3HAC032694-001Robot cable, power: L=3 m
3HAC032695-001Robot cable, power: L=7 m
3HAC032696-001Robot cable, power: L=15 m
Robot cable, signal
Art. no.Cable
3HAC035320-001Robot cable, signal: L=3 m
3HAC2493-1Robot cable, signal: L=7 m
3HAC2530-1Robot cable, signal: L=15 m
Continues on next page
Product manual - IRB 120 85
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
2 Installation and commissioning
2.6.1 Robot cabling and connection points
 Loading...
Loading...




