164 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Appendix D Application Notes
– If there is a lot of oscillation in the PID Feedback before settling out
(see Figure 39
), increase A155 [PID Integ Time].
3. At this point, the differential gain may not be needed. However, if after
determining the values for A154
[PID Prop Gain] and A155 [PID Integ
Time]:
– Response is still slow after a step change, increase A156
[PID Diff
Rate].
– Response is still unstable, decrease A156
[PID Diff Rate].
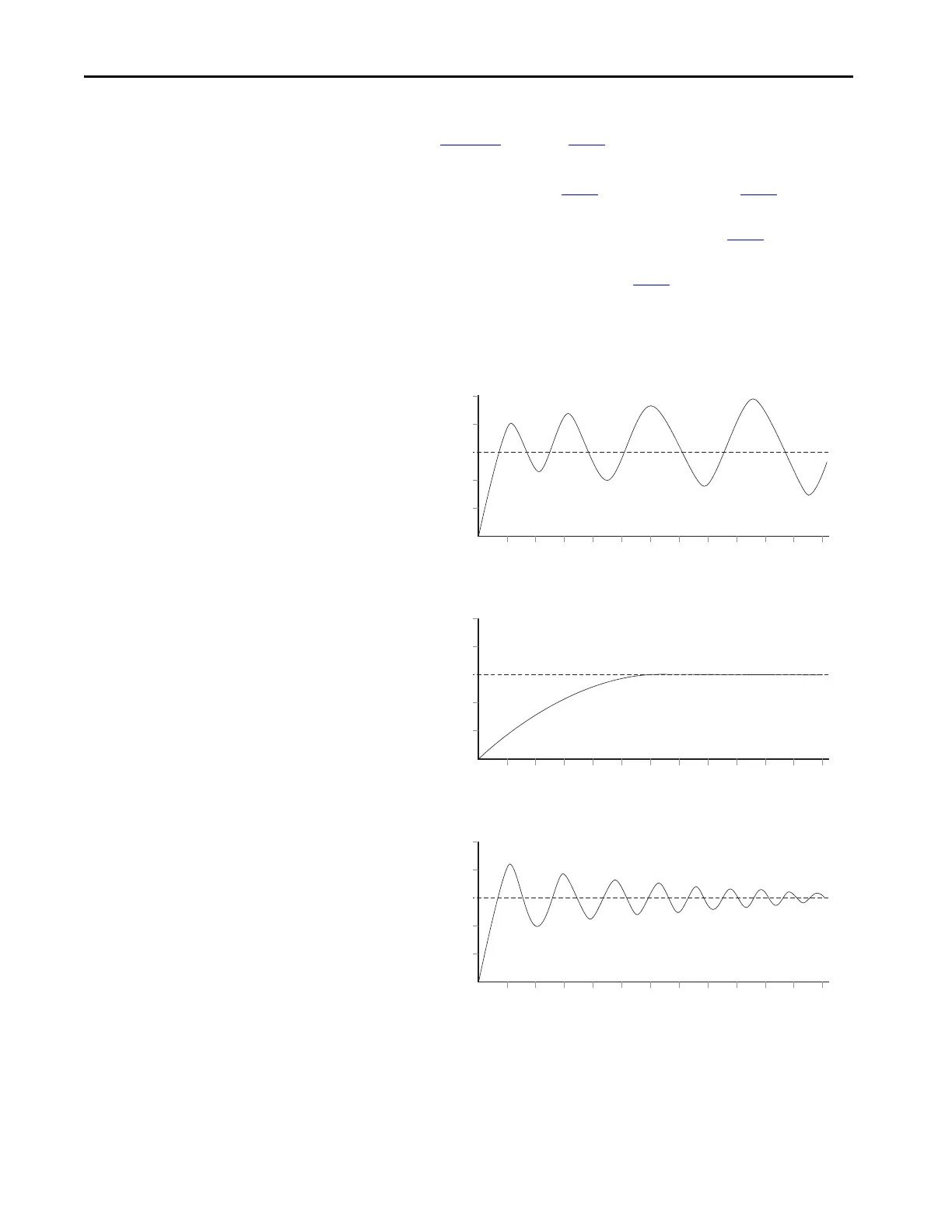
The following figures show some typical responses of the PID loop at different
points during adjustment of the PID Gains.
Figure 37 - Unstable
Figure 38 - Slow Response – Over Damped
Figure 39 - Oscillation – Under Damped
PID Feedback
PID Reference
Time
PID Feedback
PID Reference
Time
PID Feedback
PID Reference
Time
 Loading...
Loading...