Appendix
EL20xx, EL2124 151Version: 5.2
6.3 Firmware compatibility
Beckhoff EtherCAT devices are delivered with the latest available firmware version. Compatibility of firmware
and hardware is mandatory; not every combination ensures compatibility. The overview below shows the
hardware versions on which a firmware can be operated.
Note
• It is recommended to use the newest possible firmware for the respective hardware.
• Beckhoff is not under any obligation to provide customers with free firmware updates for delivered
products.
NOTE
Risk of damage to the device!
Pay attention to the instructions for firmware updates on the separate page [}151]. If a device is placed in
BOOTSTRAP mode for a firmware update, it does not check when downloading whether the new firmware
is suitable. This can result in damage to the device! Therefore, always make sure that the firmware is suit-
able for the hardware version!
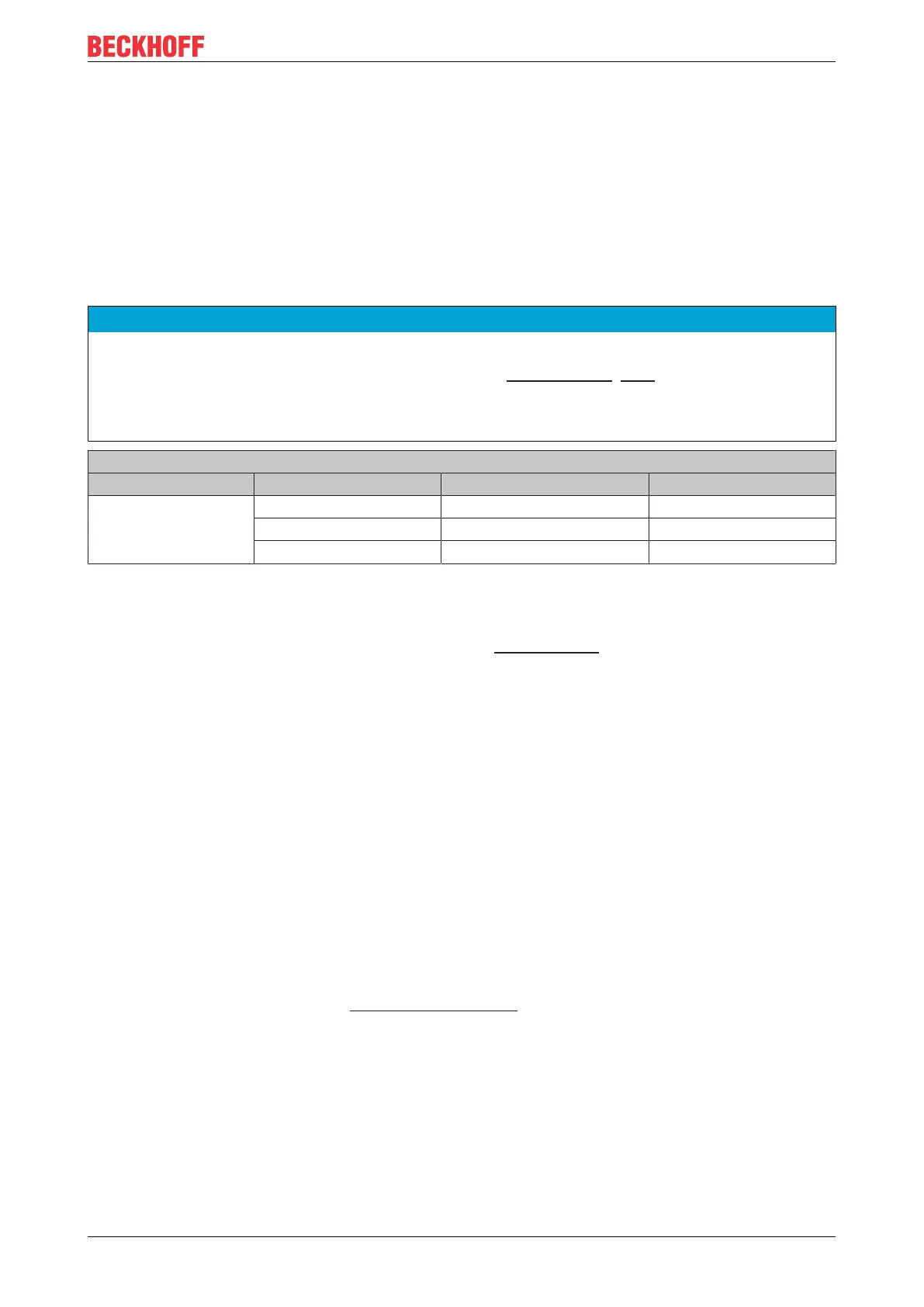
EL2014
Hardware (HW) Firmware (FW) Revision No. Date of release
00 - 01* 01 EL2014-0000-0016 2015/05
02 2015/07
03* EL2014-0000-0017 2016/03
There are no further terminals from the EL20xx and EL2124 series that have firmware.
*) This is the current compatible firmware/hardware version at the time of the preparing this documentation.
Check on the Beckhoff web page whether more up-to-date documentation is available.
6.4 Firmware Update EL/ES/EM/ELM/EPxxxx
This section describes the device update for Beckhoff EtherCAT slaves from the EL/ES, ELM, EM, EK and
EP series. A firmware update should only be carried out after consultation with Beckhoff support.
Storage locations
An EtherCAT slave stores operating data in up to 3 locations:
• Depending on functionality and performance EtherCAT slaves have one or several local controllers for
processing I/O data. The corresponding program is the so-called firmware in *.efw format.
• In some EtherCAT slaves the EtherCAT communication may also be integrated in these controllers. In
this case the controller is usually a so-called FPGA chip with *.rbf firmware.
• In addition, each EtherCAT slave has a memory chip, a so-called ESI-EEPROM, for storing its own
device description (ESI: EtherCAT Slave Information). On power-up this description is loaded and the
EtherCAT communication is set up accordingly. The device description is available from the download
area of the Beckhoff website at (https://www.beckhoff.de). All ESI files are accessible there as zip files.
Customers can access the data via the EtherCAT fieldbus and its communication mechanisms. Acyclic
mailbox communication or register access to the ESC is used for updating or reading of these data.
The TwinCAT System Manager offers mechanisms for programming all 3 parts with new data, if the slave is
set up for this purpose. Generally the slave does not check whether the new data are suitable, i.e. it may no
longer be able to operate if the data are unsuitable.

 Loading...
Loading...








