Technical description
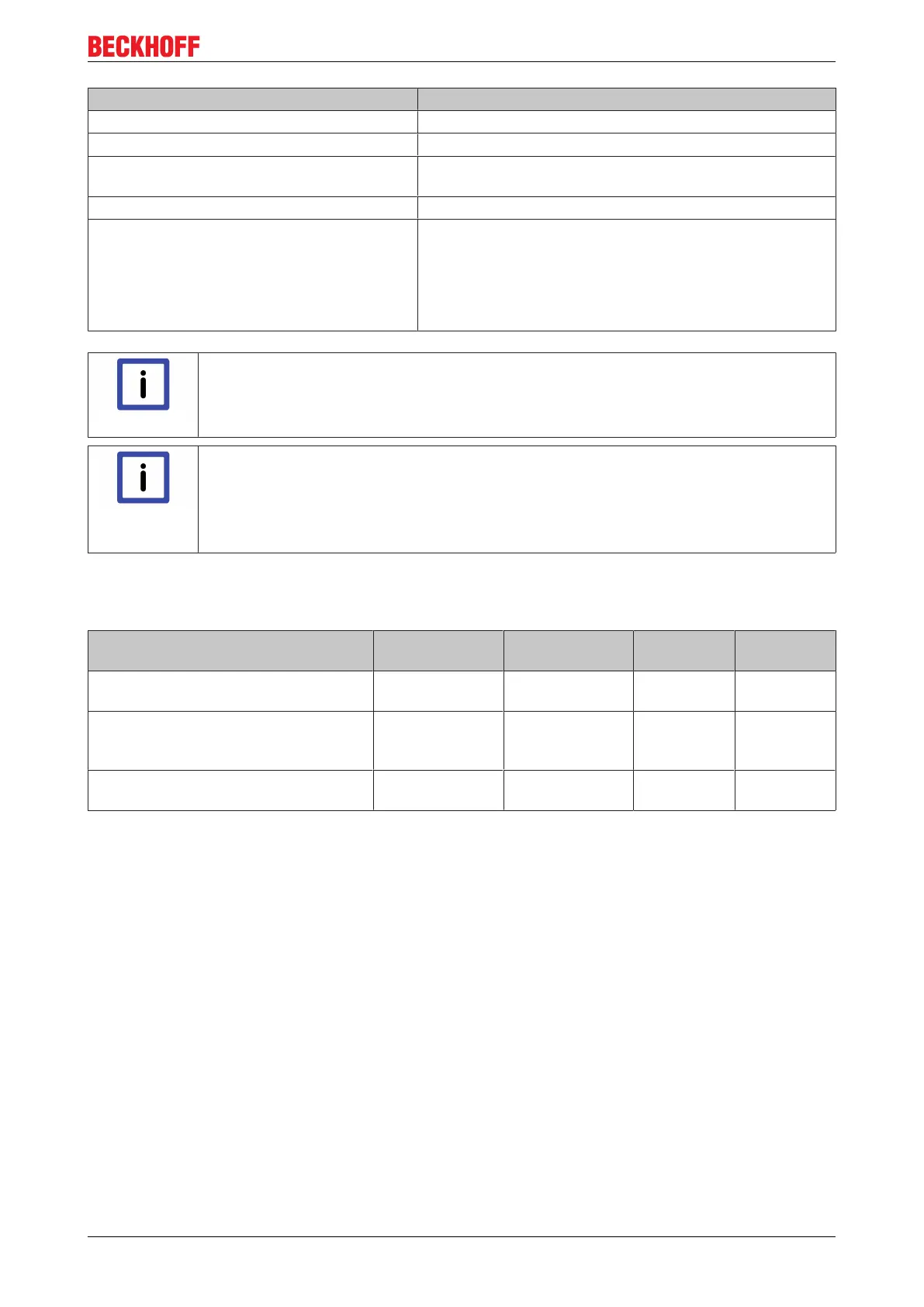
Electrical data XTS
Supply voltage Control voltage 24 V
DC
, power supply 50 V
DC
Current consumption Power supply: 16 A rated current
Power consumption control voltage (24 V) Motor modules: 30 W/m (communication, electronics,
displacement measurement)
Length per infeed Typically 1 m – max. 3 m (depending on computing power)
Power consumption per mover approx. 30 W at 2 m/s constant speed
approx. 60 W at 4 m/s constant speed
approx. 60 W at a peak acceleration of 10 m/s² and a mass
of 1 kg
approx. 300 W at a peak acceleration of 50 m/s² and a
mass of 1 kg
Note
Length per infeed!
The length per infeed is application-dependent. For precise dimensioning of the power sup-
ply please contact the Beckhoff applications department.
Note
Energy recovery from the XTS
The XTS is capable of energy recovery. If kinetic energy is fed back during an emergency
stop, measures should be taken to avoid voltage overshoot, and associated premature
auto-shutdown of the motor modules. For further information please contact the Beckhoff
applications department.
6.1.1 Dimensions
Module Width at the ma-
chine bed
Width at the
track connection
Height Depth
Straight motor module
AT2001-0250
39.1 mm 22.1 mm 96 mm 250 mm
Straight line motor module with power
supply
AT2001-0250
39.1 mm 22.1 mm 96 mm 250 mm
Curved motor module 180° (clothoid)
AT2050-0500
39.1 mm 22.1 mm 306.5 mm 204.2 mm
Distance between movers and modules
The air gap between the magnet and the motor should by 0.85 mm on each side. Important: The magnets
must not touch the motor modules of the XTS!
The air gap between the encoder flag and the sensor should be 0.9 mm. A tolerance range of 0.4 mm – 1.4
mm applies (as of December 2015).
Important: Under no circumstances must the encoder flag touch the sensors of the motor modules!
eXtended Transport System Start-Up 19
Version: 1.2

 Loading...
Loading...