Installation
7.5 Collision avoidance
7.5.1 Operating principle of collision avoidance
In collision avoidance mode, the parameters “InTarget”, “InPosition” and “HasJob” are disabled, even if they
were configured. Collision avoidance is intended to assign all movers concrete travel paths, velocities and
gaps. These settings prevent collisions of the movers during motion.
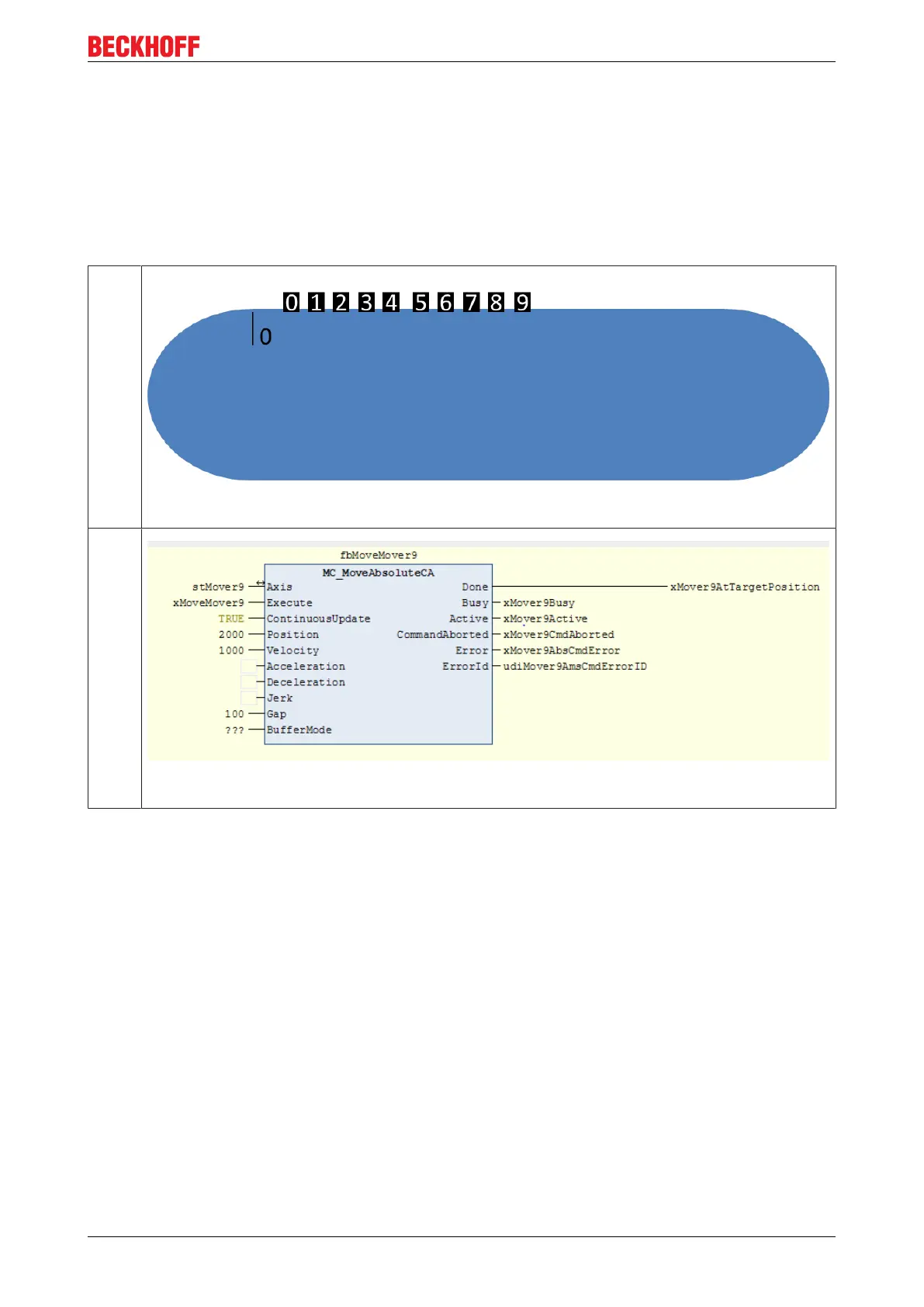
1a.
All movers are positioned at the zero point (feed-in motor module). Various settings are now
implemented via the PLC blocks of the movers, which prevent collisions between the movers.
1b.
This window shows the PLC block for mover no. 9. We now instruct this mover to move to position
2000 with a velocity of 1000. The gap of mover in traversing direction is set to 100.
eXtended Transport System Start-Up 41
Version: 1.2

 Loading...
Loading...