1.1.4 Definitions
Adjustable frequency drive:
I
VLT,MAX
Maximum output current.
I
VLT,N
Rated output current supplied by the adjustable frequency
drive.
U
VLT, MAX
Maximum output voltage.
Input:
Control command
Start and stop the connected motor by means of LCP and
digital inputs.
Functions are divided into two groups.
Functions in group 1 have higher priority than functions in
group 2.
Group 1 Reset, Coasting stop, Reset and Coasting stop,
Quick stop, DC braking, Stop and the [OFF] key.
Group 2 Start, Pulse start, Reversing, Start reversing, Jog and
Freeze output
Motor:
Motor Running
Torque generated on output shaft and speed from zero rpm
to max. speed on motor.
f
JOG
Motor frequency when the jog function is activated (via
digital terminals).
f
M
Motor frequency.
f
MAX
Maximum motor frequency.
f
MIN
Minimum motor frequency.
f
M,N
Rated motor frequency (nameplate data).
I
M
Motor current (actual).
I
M,N
Rated motor current (nameplate data).
n
M,N
Rated motor speed (nameplate data).
n
s
Synchronous motor speed
n
s
=
2×
par
. 1 − 23 × 60
s
par
. 1 − 39
P
M,N
Rated motor power (nameplate data in kW or HP).
T
M,N
Rated torque (motor).
U
M
Instantaneous motor voltage.
U
M,N
Rated motor voltage (nameplate data).
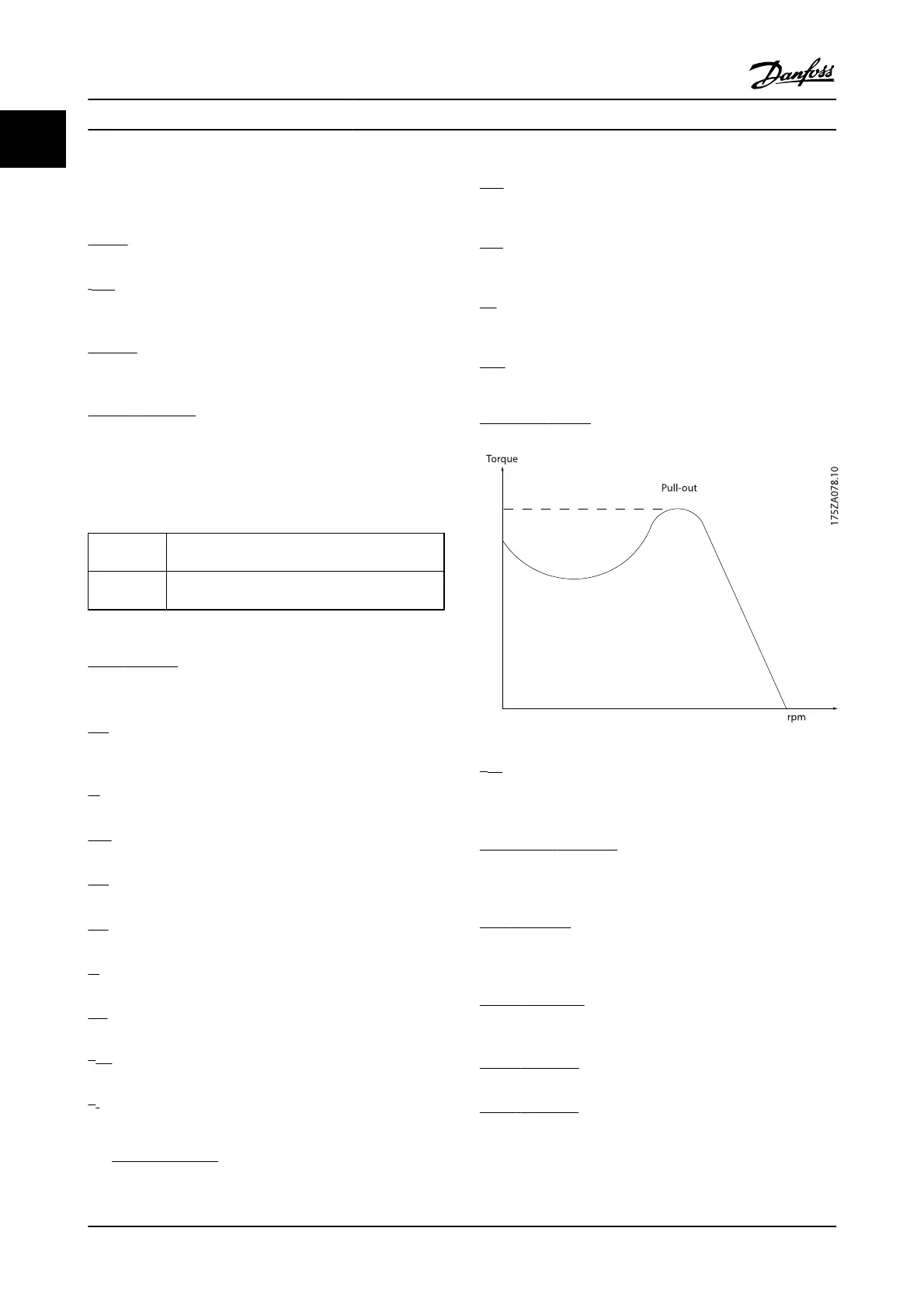
Break-away torque
η
VLT
The efficiency of the adjustable frequency drive is defined as
the ratio between the power output and the power input.
Start-disable command
A stop command belonging to the group 1 control
commands - see this group.
Stop command
See Control commands.
References:
Analog Reference
A signal transmitted to the analog inputs 53 or 54, can be
voltage or current.
Binary Reference
A signal transmitted to the serial communication port.
Preset Reference
A defined preset reference to be set from -100% to +100% of
the reference range. Selection of eight preset references via
the digital terminals.
Introduction FC 300 Programming Guide
1-2 MG.33.MA.22 - VLT
®
is a registered Danfoss trademark
1
 Loading...
Loading...



