VLT
®
5000 SyncPos option
MG.10.J4.02 – VLT is a registered Danfoss trade mark
30
■■
■■
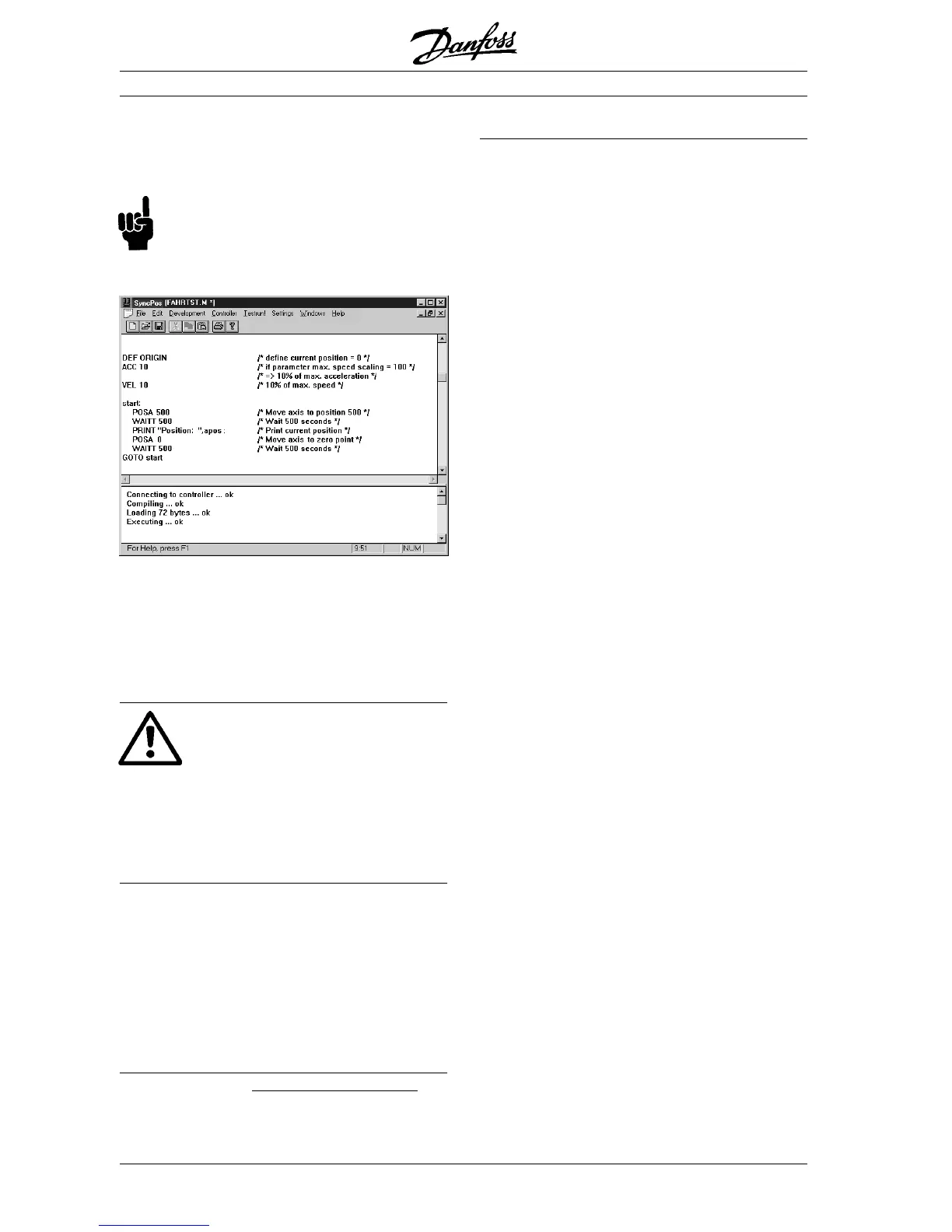
■ Execute the test run program
Now connect the motor to the VLT, make sure that
the motor can turn completely freely.
NB!
The motor must be provided with an [EMER-
GENCY STOP] button.
Click on "FILE" and "OPEN"
the file
Fahrtst.m Fahrtst.m
Fahrtst.m Fahrtst.m
Fahrtst.m.
Click on "DEVELOPMENT" and start the test pro-
gram with "EXECUTE"
or
[F5].
The test is successful if the motor runs slowly back
and forth and position 500 is registered.
End the test with [ESC] and "CLOSE" the "FILE".
If the motor sets off uncontrolled or vibrates heavily
NB!
Turn off the motor immediately with the
EMERGENCY STOP button if it vibrates
heavily or sets off uncontrolled.
If the motor sets off uncontrolled, but the encoder
test previously was successful, then decrease the
Proportional factor Proportional factor
Proportional factor Proportional factor
Proportional factor (parameter 702). (See Optimi-
zing the PID controller)
If the motor doesn’t move
If the motor doesn’t move at all, then the proportio-
nal factor of the PID filter is probably too low or
the VLT has not been enabled.
Check the VLT enable (terminal 27 = 24 V) and
check that the VLT wasn't stopped via the LCP
(flashing display). Then increase the
ProportionalProportional
ProportionalProportional
Proportional
factor factor
factor factor
factor (parameter 702). (See Optimizing the PID
controller)
If the motor vibrates heavily …
… then you have to
optimize the PID controller and
to adjust the other parameters of the controller:
reduce either the
Proportional factor Proportional factor
Proportional factor Proportional factor
Proportional factor KPROP (11)
or increase the
Derivative factor Derivative factor
Derivative factor Derivative factor
Derivative factor KDER (12).
If a "tolerated position error is exceeded" is reported
If the drive stops due to a “tolerated position error is
exceeded” message it is possible to determine
whether the drive was rotating in the wrong
direction by comparing the curves of the set and
actual values.
Check the connections of the motor or encoder. If
the connections are correct, then it is necessary to
increase the
TT
TT
T
olerated position error olerated position error
olerated position error olerated position error
olerated position error POSERR (15).
(See Optimizing the PID controller)
Starting the SyncPos option step-by-step
 Loading...
Loading...






