35
MG.10.J4.02 – VLT is a registered Danfoss trade mark
VLT
®
5000 SyncPos option
8. If you are using the integration part of the PID
controller, remember to reduce the KILIM as
much as possible (without losing the KINT-
effect of course) in order to reduce oscillations
and overshoot as much as possible.
9. Reduce the BANDWIDTH as much as possib-
le. With a properly optimized open-loop con-
trol BANDWIDTH could be reduced to as little
as 6 or 12 %.
10. Set the POSERR (15) parameter back to nor-
mal e.g. 20000.
"TEST PARAMETER" → "SAVE"
Once you have concluded the "TESTRUN"
→→
→→
→
"SAVE"
the new parameters as the user parameters.
Thus, these parameters are saved in the controller
and in the future will be used for all programs.
■ What to do if...
... there is a tendency towards instability
In the event of a strong tendency towards instabi-
lity reduce the proportional and derivative factors
again, or reset the integral factor.
... stationary precision is required
If stationary precision is required then you must
increase the integral factor.
... the tolerated position error is exceeded
If the test run is constantly interrupted with the
message “position error” set the parameter for the
TT
TT
T
olerated position errorolerated position error
olerated position errorolerated position error
olerated position error POSERR (15) – within the
tolerable limits– as large as possible.
If the position error occur during the acceleration
phase that suggests that the set acceleration can-
not be achieved under the existing load conditions.
Increase the
TT
TT
T
olerated position errorolerated position error
olerated position errorolerated position error
olerated position error POSERR (15)
or determine a maximum acceleration suitable for
the entire system.
If position error do not occur until after the accele-
ration phase and they can be delayed but not eli-
minated by increasing the
TT
TT
T
olerated position errorolerated position error
olerated position errorolerated position error
olerated position error
,,
,,
,
this suggests that the maximum velocity (rpm)
chosen is too high. Determine a maximum velocity
suitable for the entire system.
.. the maximum acceleration is not achieved
In general, the technical data for a drive are only va-
lid for a freely rotating axle end. If the drive is carrying
a load the maximum acceleration is reduced.
The theoretical maximum acceleration will also not
be achieved if, for example, the PID controller out-
put is too small or the VLT/motor is not sized cor-
rectly and therefore does not provide enough
energy for peak consumption during acceleration.
■■
■■
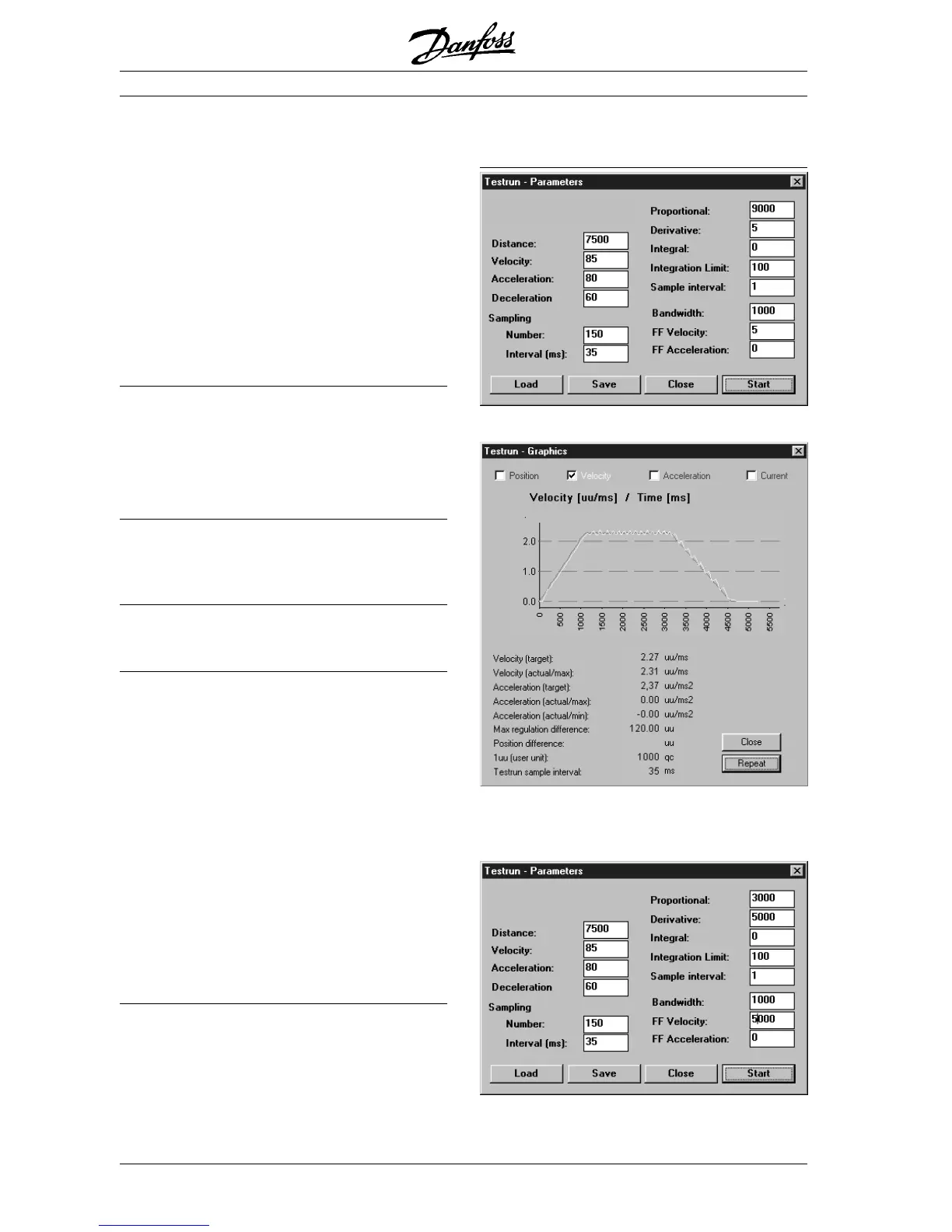
■ Examples of control optimization
Dampening of vibrations
The drive vibrates:
By increasing the
Derivative factorDerivative factor
Derivative factorDerivative factor
Derivative factor to 5000 and
reducing the
Proportional factor Proportional factor
Proportional factor Proportional factor
Proportional factor to 3000 vibration
during running and braking is lessened
..
..
.
Optimizing the PID controller
 Loading...
Loading...






