VLT
®
5000 SyncPos option
MG.10.J4.02 – VLT is a registered Danfoss trade mark
70
Program sample
ACC_01.M
■■
■■
■ APOS
The APOS command can query the absolute
position of the axis related to the actual zero point.
Summary
reads actual position
Syntax
res = APOS
Return value
res = absolute actual position in user units (UU)
related to the actual zero point
All path information in motion commands are
made in user units and are converted to quad-
counts internally. (See also Numerator and Denomi-
nator, Parameter 23 and 26.)
The user unit (UU) corresponds in standard setting
to the number of Quad counts.
Parameter POSFACT_Z (23) / POSFACT_N (26) = 1
NB!
If a temporary zero point which has been set
via SET ORIGIN exists, then the position
value is relative to this zero point.
Command group
I/O
Cross Index
CPOS, DEF ORIGIN, SET ORIGIN, POSA, POSR
Parameter: POSFACT_Z (23) and POSFACT_N (26)
Syntax-Example
PRINT APOS
/* display the actual position of axis on the PC */
Program sample
APOS_01.M,
GOSUB_01.M, MOTOR_01.M
■■
■■
■ All Commands from ACC to #INCLUDE
In the following section all commands are listed in
alphabetical order and described in detail with
syntax examples.
■■
■■
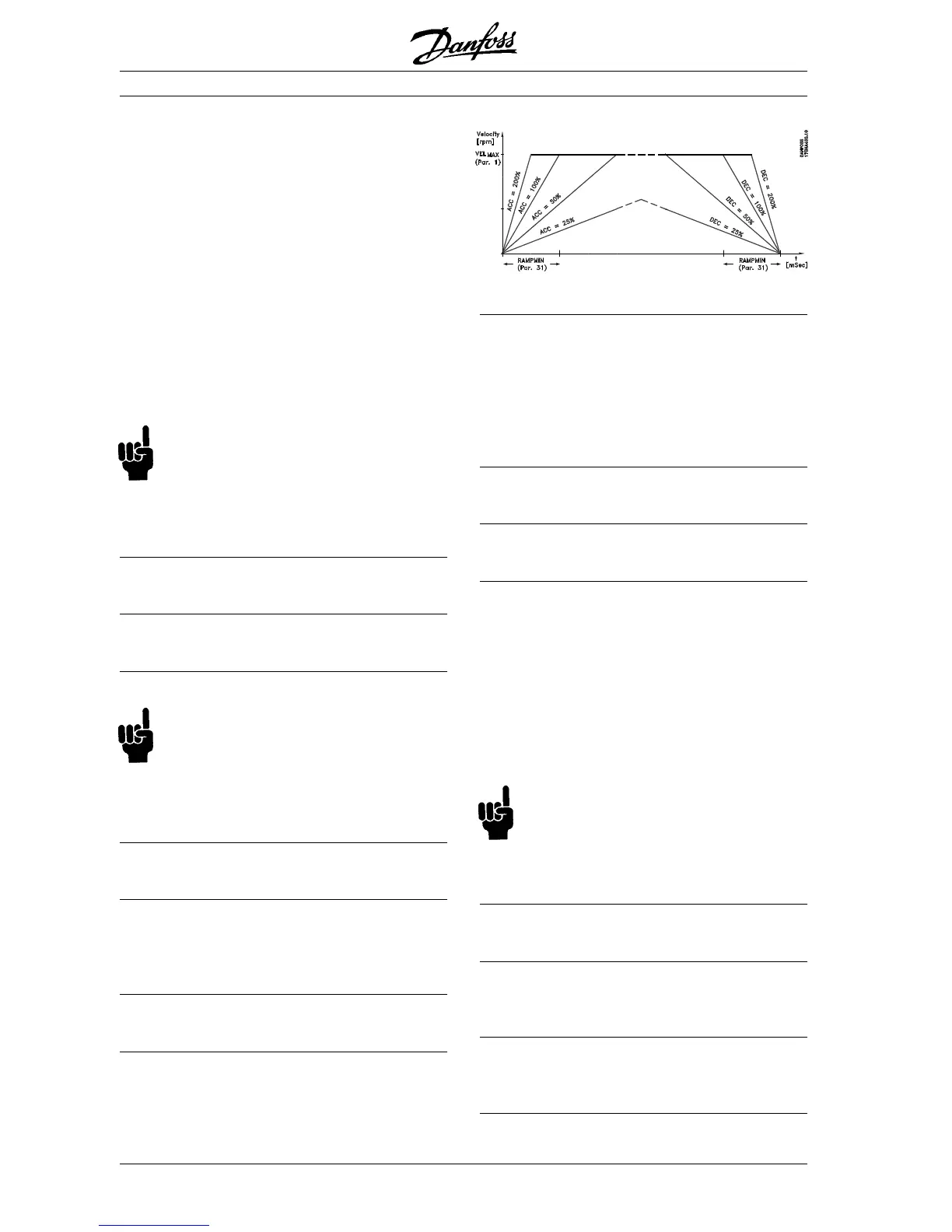
■ ACC
The ACC command defines the acceleration for
the next motion command (speed control, synchro-
nizing or positioning). The value will remain valid
until a new acceleration value is set, using the ACC
command. The value is related to the parameters
Shortest ramp Shortest ramp
Shortest ramp Shortest ramp
Shortest ramp RAMPMIN (31) and
MaximumMaximum
MaximumMaximum
Maximum
velocity velocity
velocity velocity
velocity VELMAX (1) as well as
VV
VV
V
elocity resolutionelocity resolution
elocity resolutionelocity resolution
elocity resolution
VELRES (22).
NB!
If you work with the SyncPos option card
then you should always set the ramps via
the option card and not in the VLT. The VLT ramps
must always be set to minimum.
Summary
setting acceleration for motion commands
Syntax
ACC a
Parameter
a = acceleration
NB!
If acceleration has not been defined previ-
ous to a motion command, then the
acceleration will be the value of parameter
DFLTACC(34).
Command group
REL, ABS
Cross Index
DEC, VEL, POSA, POSR
Parameter: RAMPMIN (31), VELMAX (1), VELRES
(22)
Syntax-Example
ACC 10 /* Acceleration 10 */
Example
minimum acceleration time:1000 msec
maximum velocity: 1500 Rpm (25 Rev./s)
velocity resolution: 100
Software Reference
 Loading...
Loading...






