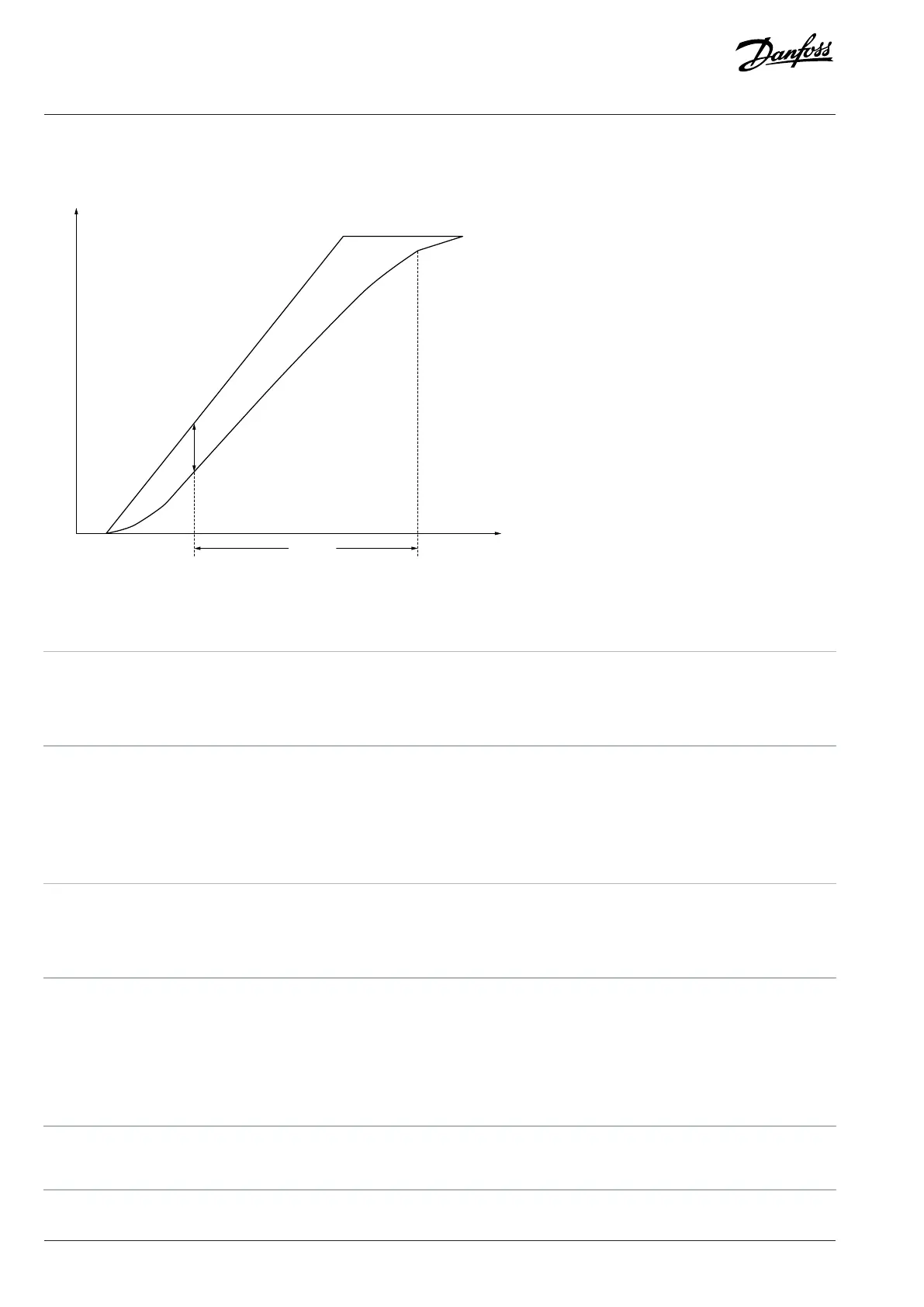
Select the maximum allowed error in speed (output speed versus feedback).
Figure 27: Motor Feedback Speed Error
4-32 Motor Feedback Loss Timeout
Default value: 0.05 s Parameter type: Range (0.00 s–60.00 s)
Setup: All setups Conversion index: -2
Data type: Uint16 Change during operation: True
Set the timeout value allowing the speed error set in parameter 4-31 Motor Feedback Speed Error to be exceeded before enabling the
function selected in parameter 4-30 Motor Feedback Loss Function.
4.5.4 4-4* Adj. Warnings 2
4-40 Warning Freq. Low
Default value: Size related Parameter type: Range (0.0–500.0)
Setup: All setups Conversion index: -1
Data type: Uint16 Change during operation: True
Use this parameter for setting a lower limit for the frequency range. When the motor speed drops below this limit, the display reads
Speed low. Warning bit 10 is set in parameter 16-94 Ext. Status Word. Output relay can be configured to indicate this warning. LCP
warning indicator light is not lit when the limit set is reached. The value must not exceed the setting in parameter 4-41 Warning Freq.
High.
4-41 Warning Freq. High
Default value: Size related Parameter type: Range (0.0–500.0)
Setup: All setups Conversion index: -1
104 | Danfoss A/S © 2024.01 AU275649936274en-001401 / 130R0507
Programming Guide | VLT® AutomationDrive FC 360
 Loading...
Loading...












