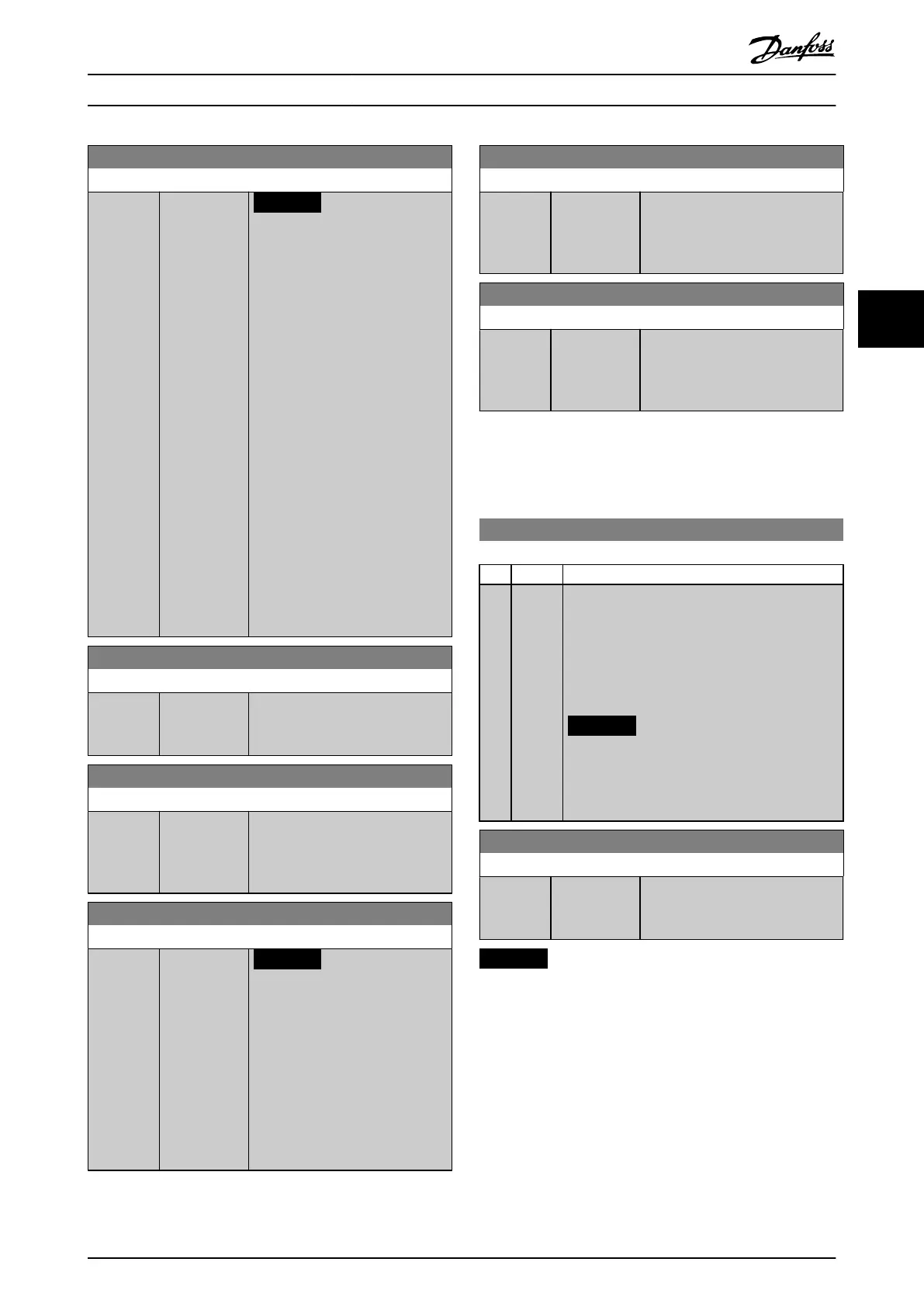
2-01 DC Brake Current
Range: Function:
50 %* [ 0 - 1000 %]
NOTICE
The maximum value depends
on the rated motor current.
Avoid 100% current for too
long. It may damage the
motor.
Enter a value for current as a
percentage of the rated motor
current I
M,N
, see
parameter 1-24 Motor Current. 100%
DC brake current corresponds to
I
M,N
.
DC brake current is applied on a
stop command, when the speed is
lower than the limit set in
parameter 2-03 DC Brake Cut In
Speed [RPM]; when the DC Brake
Inverse function is active, or via the
serial communication port. The
braking current is active during the
time period set in
parameter 2-02 DC Braking Time.
2-02 DC Braking Time
Range: Function:
10 s* [0 - 60 s] Set the duration of the DC brake
current set in parameter 2-01 DC
Brake Current, once activated.
2-03 DC Brake Cut In Speed [RPM]
Range: Function:
Size
related*
[ 0 - par. 4-13
RPM]
Set the DC brake cut-in speed for
activation of the DC brake current
set in parameter 2-01 DC Brake
Current, upon a stop command.
2-04 DC Brake Cut In Speed [Hz]
Range: Function:
Size
related*
[ 0 - par. 4-14
Hz]
NOTICE
Parameter 2-04 DC Brake Cut In
Speed [Hz] is not eective
when parameter 1-10 Motor
Construction = [1] PM, non-
salient SPM.
Set the DC brake cut-in speed for
activation of the DC brake current
set in parameter 2-01 DC Brake
Current after a stop command.
2-06 Parking Current
Range: Function:
50 %* [ 0 - 1000 %] Set current as percentage of rated
motor current, parameter 1-24 Motor
Current. Is used when enabled in
parameter 1-70 Start Mode.
2-07 Parking Time
Range: Function:
3 s* [0.1 - 60 s] Set the duration of the parking
current set in
parameter 2-06 Parking Current, once
activated.
4.3.2 2-1* Brake Energy Funct.
Parameter group for selecting dynamic brake parameters.
Only valid for frequency converters with brake chopper.
2-10 Brake Function
Option: Function:
[0] * O No brake resistor is installed.
[2] AC
brake
Improves braking without using a brake resistor.
This parameter controls an overmagnetization of
the motor when running with a generatoric load.
This function can improve the OVC function.
Increasing the electrical losses in the motor allows
the OVC function to increase the braking torque
without exceeding the overvoltage limit.
NOTICE
The AC brake is not as ecient as dynamic
braking with resistor.
AC brake is for VVC
+
mode in both open
and closed loop.
2-16 AC brake Max. Current
Range: Function:
100 %* [ 0 -
1000.0 %]
Enter the maximum allowed current
when using AC braking to avoid
overheating of motor windings.
NOTICE
Parameter 2-16 AC brake Max. Current has no eect when
parameter 1-10 Motor Construction = [1] PM, non salient
SPM.
Parameter Descriptions Programming Guide
MG06J202 Danfoss A/S © 03/2019 All rights reserved. 49
4 4
 Loading...
Loading...









