Setup & Operation 5. Motion Range
G6 Rev.21 69
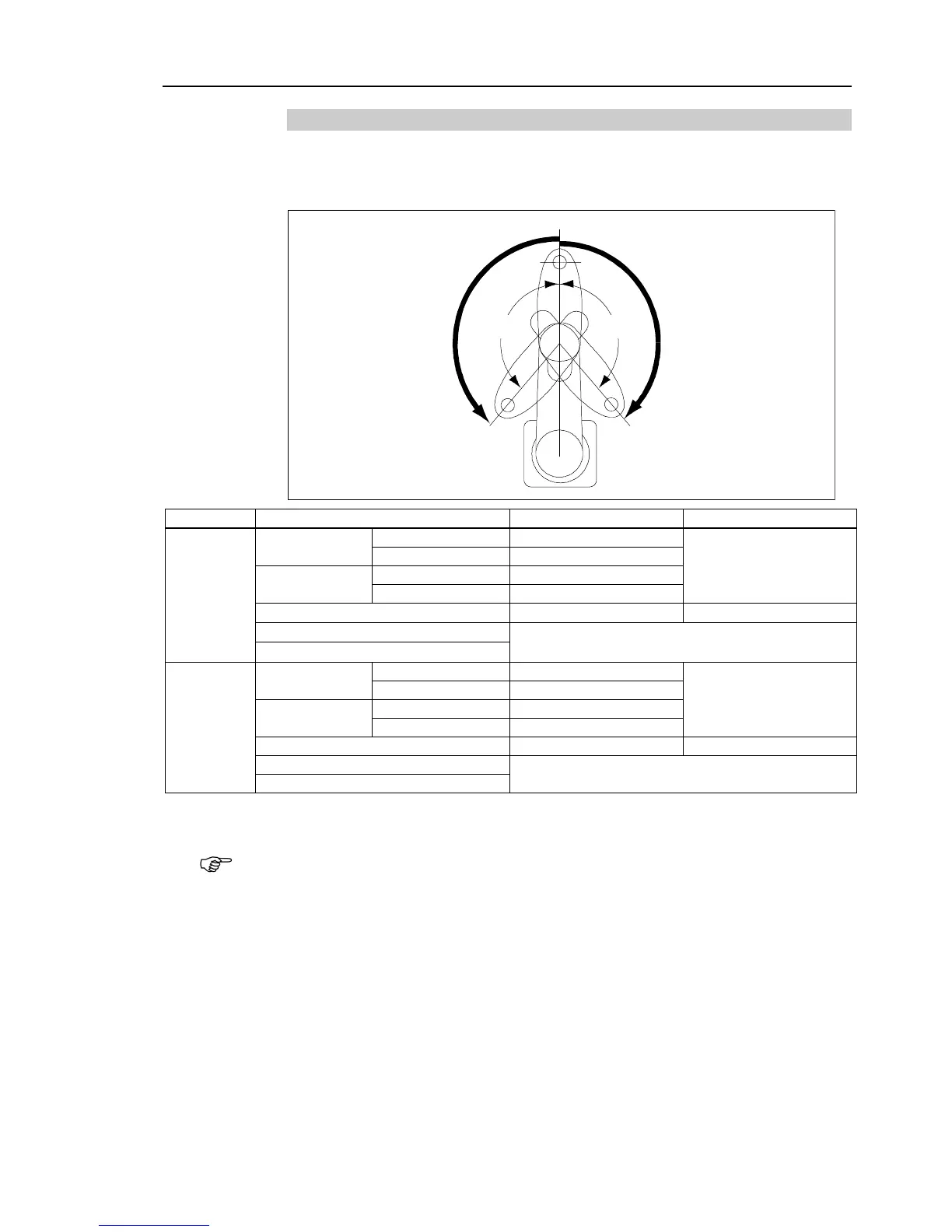
5.1.2 Max. Pulse Range of Joint #2
The 0 (zero) pulse position of Joint #2 is the position where Arm #2 is in-line with Arm #1.
With the 0 pulse as a starting point, the counterclockwise pulse value is defined as the
positive (+) and the clockwise pulse value is defined as the negative (-).
The bellows for G6-***D are options at shipment.
In the range Z: 0 to –270 mm, the area is limited by interference of the Manipulator body and the
arm.
 Loading...
Loading...









