_____ _
User Guide Electrical Line Shaft for ADV200 Page 43 of 72
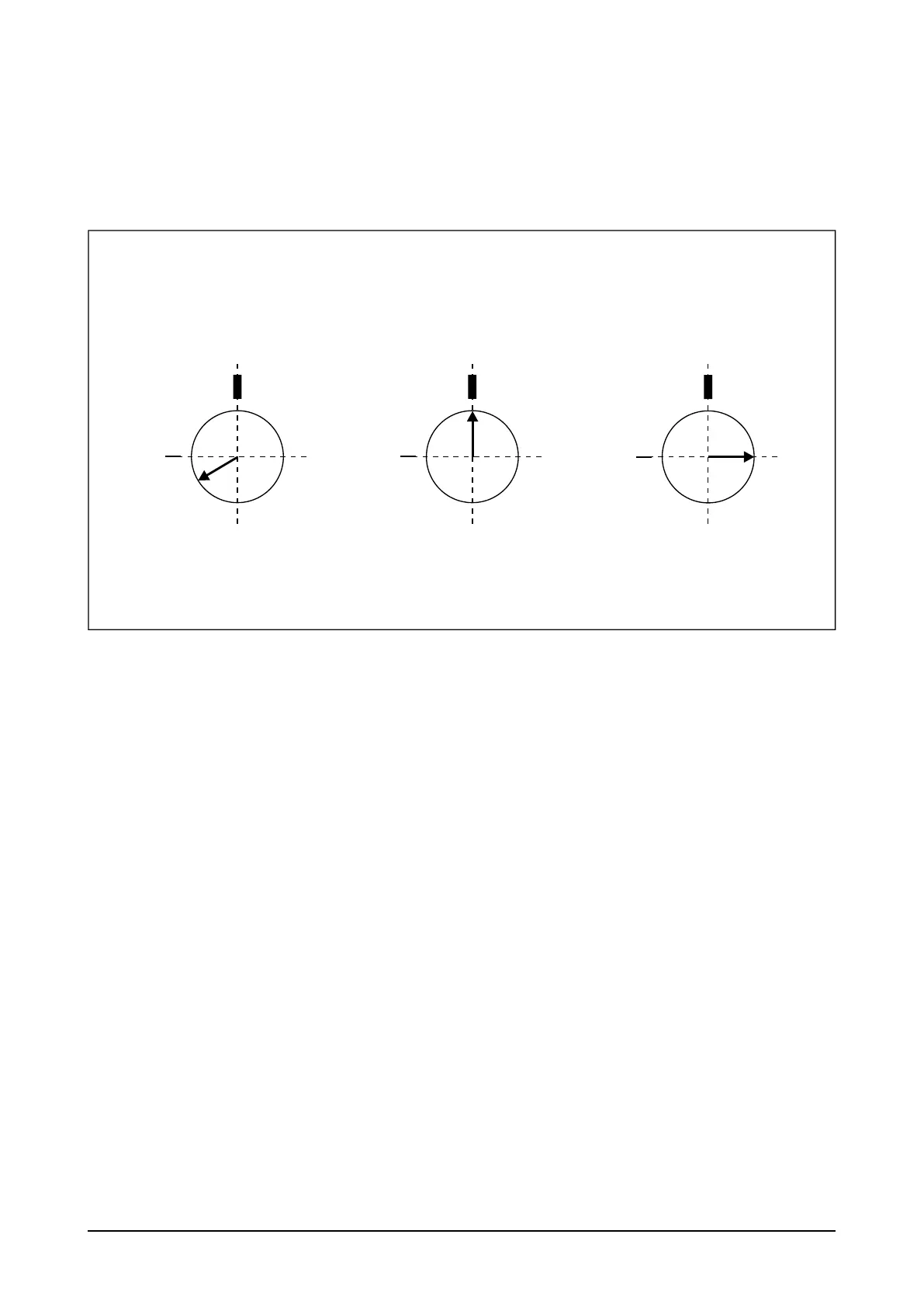
5.13.1 First positioning after Homing
Suppose you want to position a motor within a revolution (360°).
In the following diagram, the zero sensor is positioned at 0° mechanical, while “Zero User Position” is
positioned in advance at 90° mechanical.
After you have run the Homing procedure, the motor is aligned with the zero sensor. Parameter Els Act
Position shows the position set in Els Home Offset = 90u.u.
If the drive is not previously disabled, the first positioning command immediately following the Homing
procedure is absolute.
Therefore, if target position Els Pos Rel Trg = 180u.u., when the drive receives the Els Pos Start command,
the motor shifts by 90u.u. and the actual position is Els Act Position = 180u.u..
Keeping the value Els Pos Rel Trg = 180u.u., unchanged, at a subsequent Els Pos Start command the motor
goes to 360u.u.
0° Home Position
Zero User
Position
Sensor 0
Actual
Motor
Position
Condition before
Homing procedure
0° Home Position
Zero User
Position
Sensor 0
Condition after
Homing procedure:
Els Act Position = 90u.u.
0° Home Position
Zero User
Position
Sensor 0
180u.u.
Condition after
positioning at 180u.u.
Els Act Position = 180u.u.
Els UU Per Rev = 360
Els UU Mult = 1
Els UU Div = 1
(1 user unit = 1° mechanical)
Els Home Offset = 90
 Loading...
Loading...











