E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual EtherCAT Communication
2-2 HIWIN MIKROSYSTEM Corp.
2.1 System configuration
The connection type of EtherCAT is a network system that connects a master and multiple slaves. The
number of the connected slaves depends on the factors such as master’s performance, communication
cycle, etc. The master generates EtherCAT Network Information (ENI) by a configuration tool based on
EtherCAT Slave Information (ESI). The ESI file, which provides the peculiar information of the slaves, is
an XML-format file given by HIWIN.
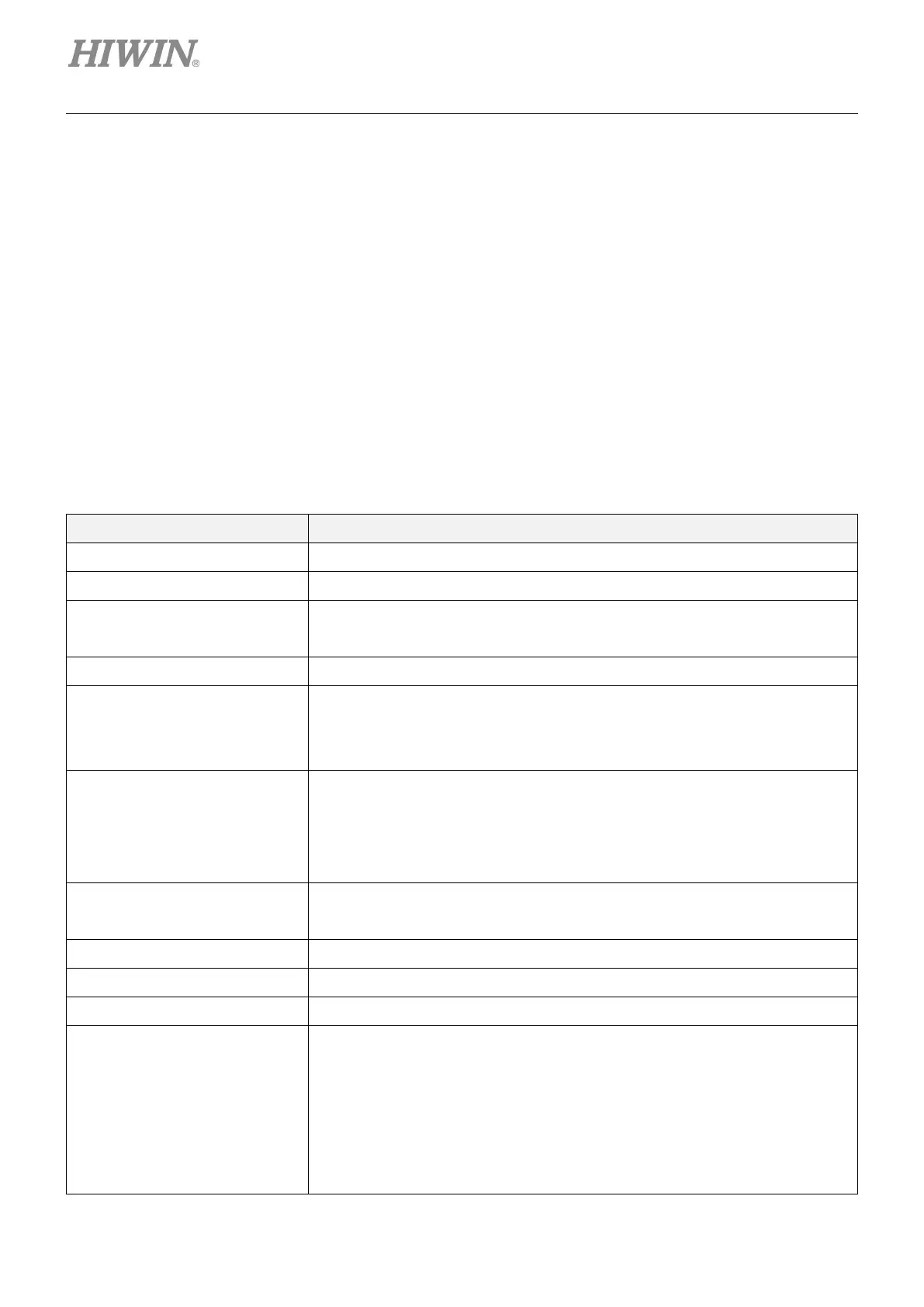
2.2 Specifications
Table 2.2.1
Item Specification
Physical layer 100BASE-TX (IEEE 802.3)
Baud 100Mbps
Connecting cable Ethernet Category 5 or higher (A twisted-pair cable with double, aluminum tape
and braided shielding is recommended.)
Cable length Maximum 100m between nodes
Connectors RJ45 x2
CN9 IN: EtherCAT input
CN9 OUT: EtherCAT output
EtherCAT indicators L/A IN x1
L/A OUT x1
RUN x1
ERR x1
Station alias (ID) Setting 1: 8 bits from 2-digit rotary switch at front panel (Range: 0~255)
Setting 2: value saved in EEPROM (Range:0~65535)
Device profile CoE (CANopen over EtherCAT)
SyncManager 4
FMMU 3
CiA 402 drive profile Profile position mode
Profile velocity mode
Profile torque mode
Homing mode
Cyclic synchronous position mode
Cyclic synchronous velocity mode

 Loading...
Loading...


