E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual Object Dictionary
3-42 HIWIN MIKROSYSTEM Corp.
Statusword (6041h) for cst mode
Table 3.2.8.2
Bit Value Definition
12
(drive follows
command value)
Drive does not follow the command value. (Ignore target torque.)
1
Drive follows the command value.
(Target torque is viewed as an input to torque control loop.)
3.2.9 Touch probe function
The function latches feedback position triggered by the index signal (Z-phase). If the function is enabled
during the usage of absolute encoder, error occurs. When the operation mode is homing mode, the touch
probe function is disabled. Do not set rising edge and falling edge at the same time.
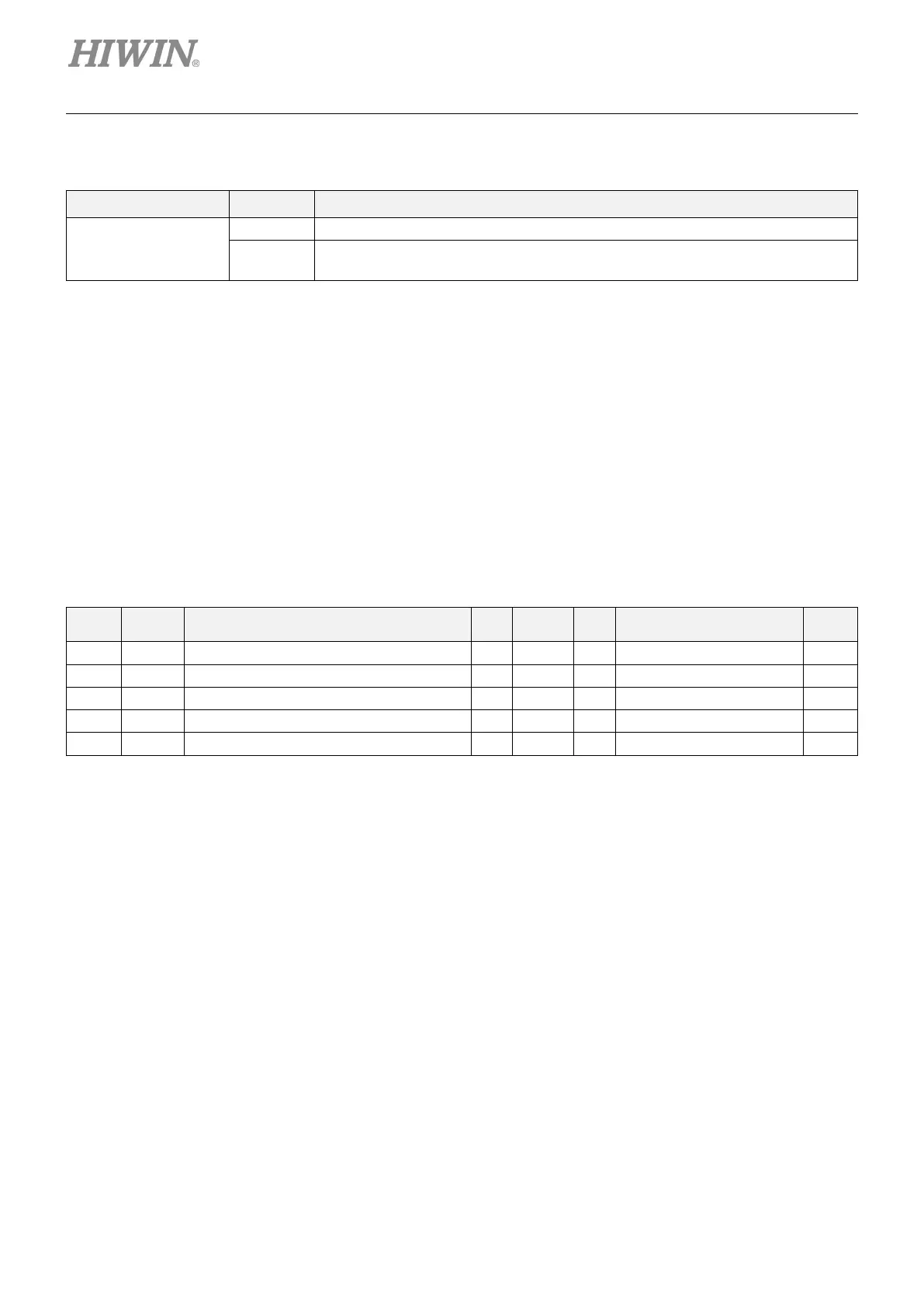
Related objects for touch probe function are listed in Table 3.2.9.1.
Table 3.2.9.1
Index
Sub-
Index
Name
Data
type
Access PDO Valid value Unit
60B8h 00h Touch probe function U16 rw Y 0 ~ 65535 -
60B9h 00h Touch probe status U16 ro Y 0 ~ 65535 -
60BAh 00h Touch probe 1 positive edge I32 ro Y -2147483648 ~ 2147483647 inc
60BBh 00h Touch probe 1 negative edge I32 ro Y -2147483648 ~ 2147483647 inc
60BCh 00h Touch probe 2 positive edge I32 ro Y -2147483648 ~ 2147483647 inc

 Loading...
Loading...


