E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual EtherCAT Communication
2-10 HIWIN MIKROSYSTEM Corp.
2.5 Synchronous mode
There are two types of synchronous mode, DC and FreeRun.
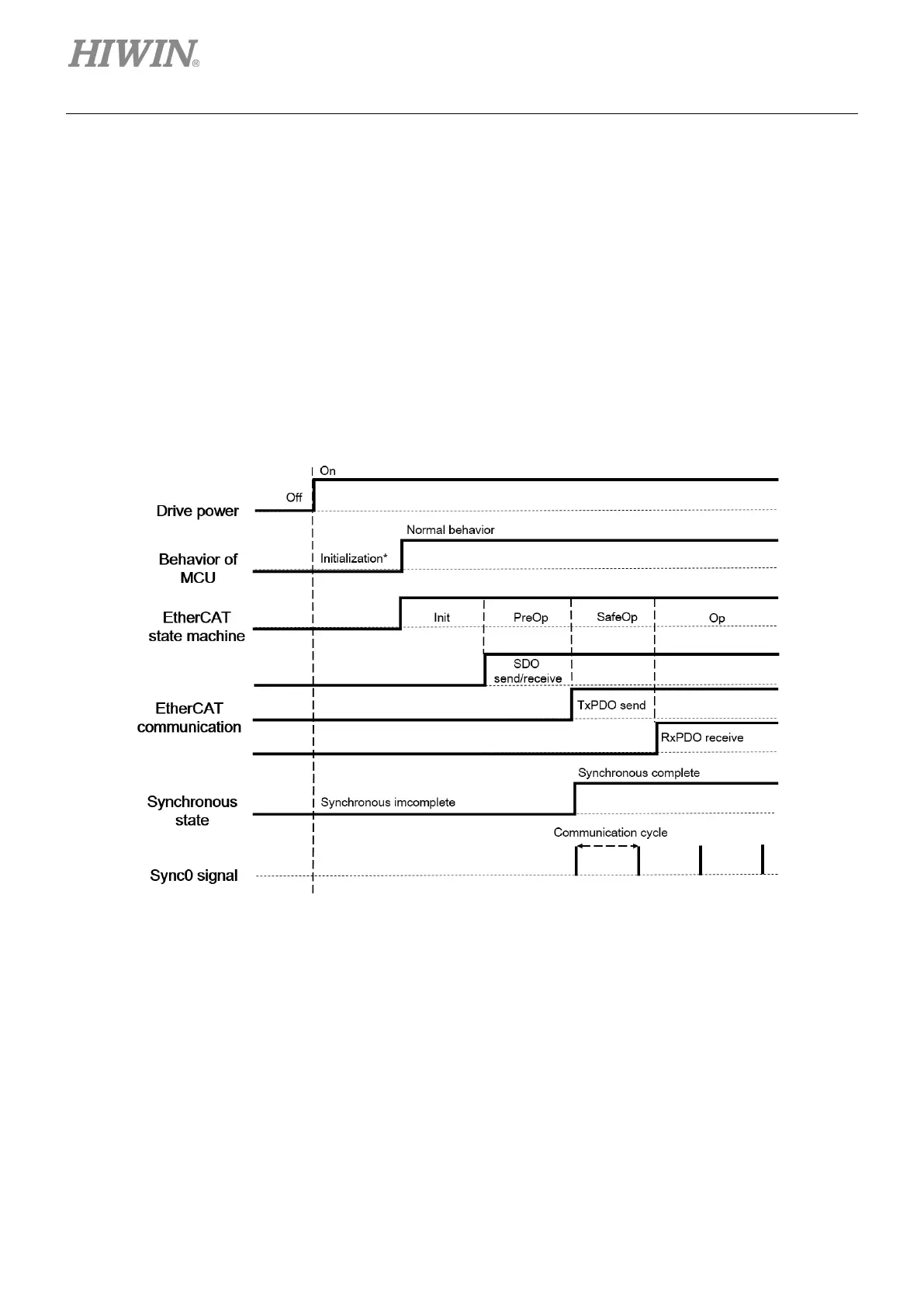
2.5.1 DC
The synchronization of EtherCAT communication is based on DC. The local cycle and the servo process
of the drive are triggered by Sync0 event.
Figure 2.5.1.1

 Loading...
Loading...


