E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual Object Dictionary
HIWIN MIKROSYSTEM Corp. 3-29
3.2.3 Cyclic synchronous position mode (csp)
The motion profile (trajectory) is generated by the master. Therefore, the position command is updated by
the master every communication cycle. Cyclic synchronous position mode is used in DC mode. Before
enabling the motor in csp mode or switching to csp mode, be sure to align 607Ah (target position) with
6064h (position actual value) first. Otherwise, it may cause dangerous behavior. If the change amount of
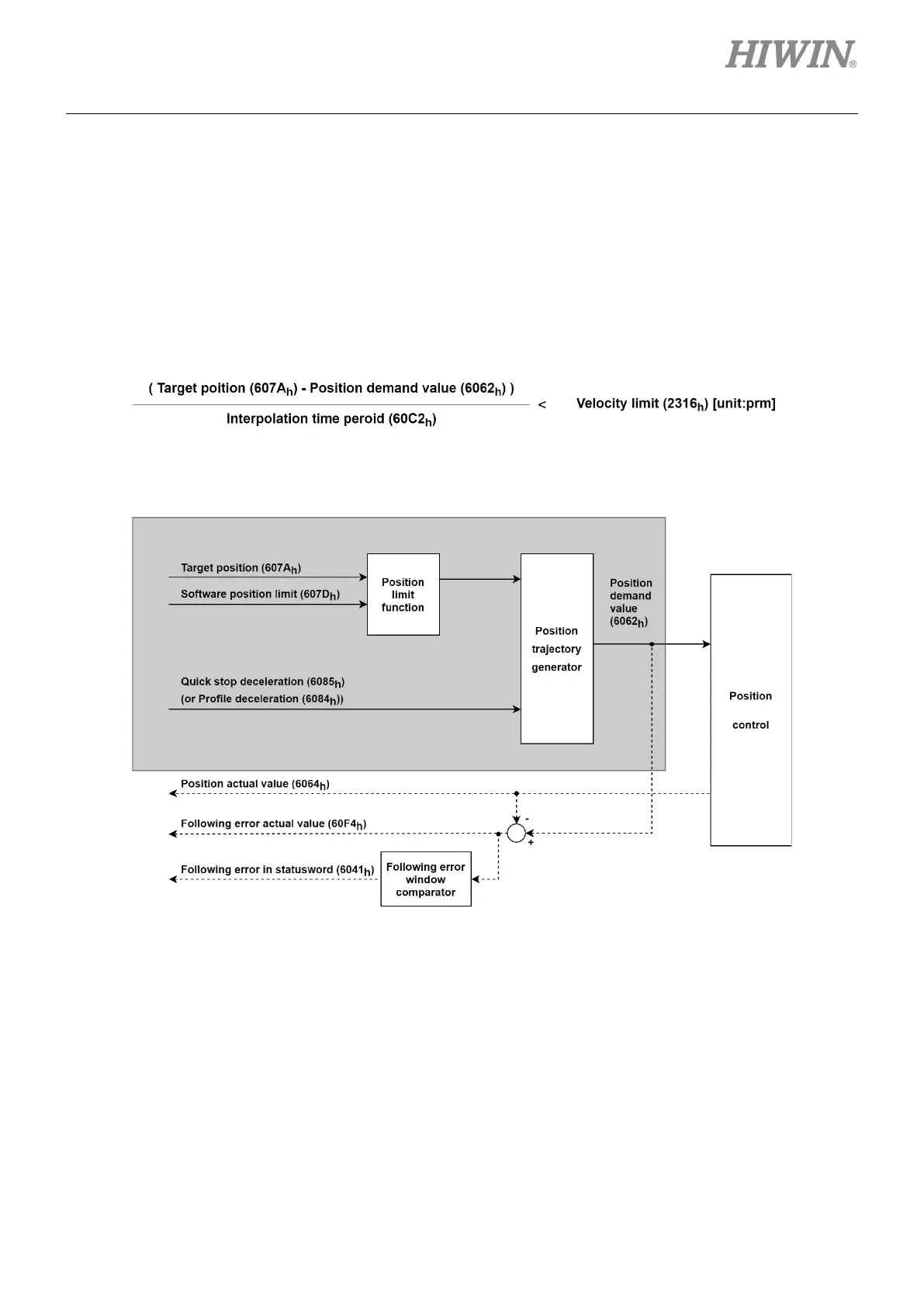
607Ah (target position) exceeds the following speed range, the target position will be ignored.
The structure of the trajectory generation is shown in Figure 3.2.3.1.
Figure 3.2.3.1

 Loading...
Loading...


