E1 Series Servo Drive EtherCAT(CoE) Communications Command Manual Object Dictionary
3-36 HIWIN MIKROSYSTEM Corp.
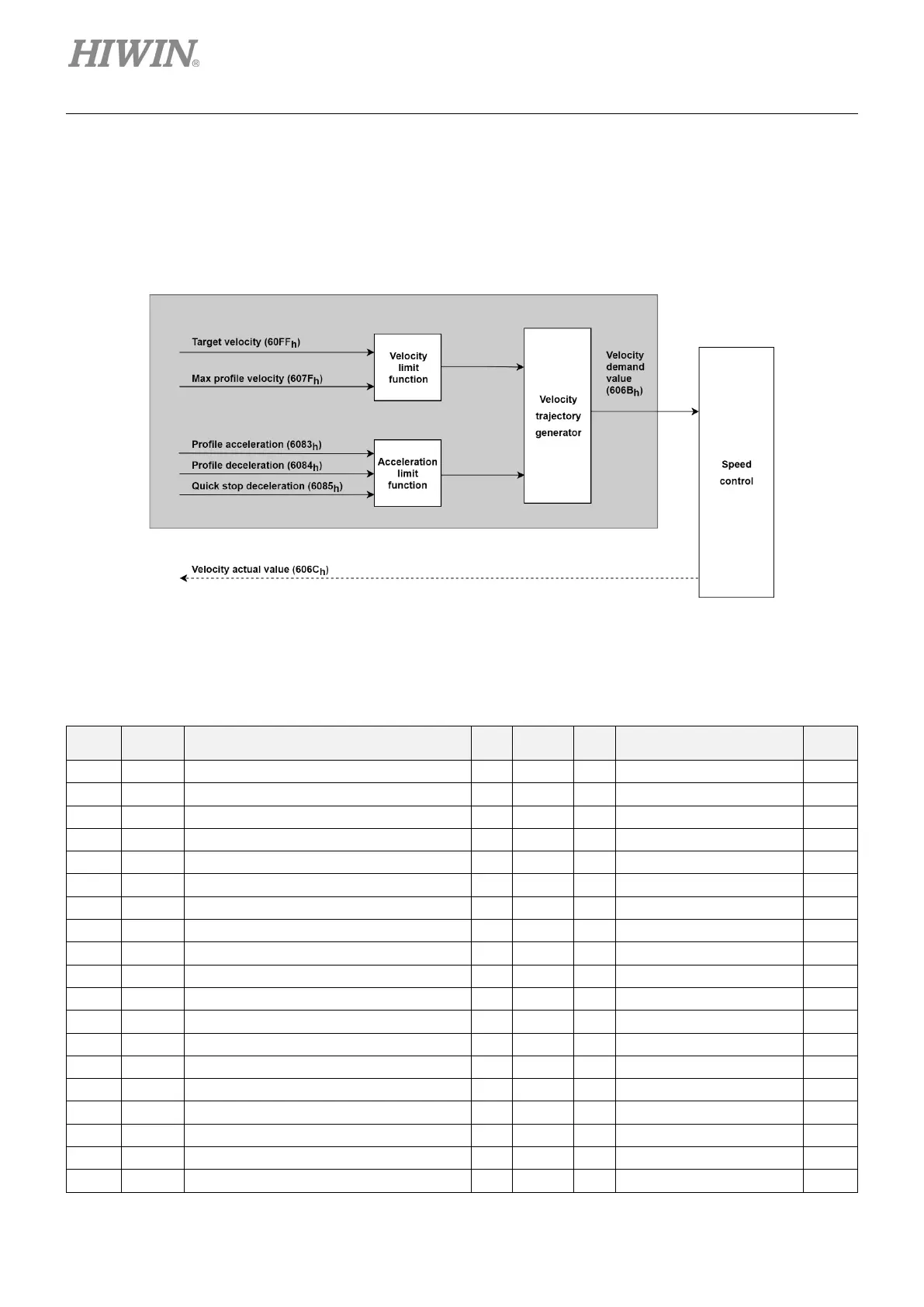
3.2.5 Profile velocity mode (pv)
The motor speed is output according to the profile acceleration and the profile deceleration until it reaches
the target velocity. The structure of the trajectory generation is shown in Figure 3.2.5.1.
Figure 3.2.5.1
Related objects for pv mode are listed in Table 3.2.5.1.
Table 3.2.5.1
Index
Index
Name
type
Access PDO Valid value Unit
6040h 00h Controlword U16 rw Y 0x0 ~ 0xFFFF -
6041h 00h Statusword U16 ro Y 0x0 ~ 0xFFFF -
6062h 00h Position demand value I32 ro Y -2147483648 ~ 2147483647 inc
6063h 00h Position actual internal value I32 ro Y -2147483648 ~ 2147483647 count
6064h 00h Position actual value I32 ro Y -2147483648 ~ 2147483647 inc
606Bh 00h Velocity demand value I32 ro Y -2147483648 ~ 2147483647 inc/s
606Ch 00h Velocity actual value I32 ro Y -2147483648 ~ 2147483647 inc/s
606Dh 00h Velocity window U16 rw Y 0 ~ 65535 inc/s
606Eh 00h Velocity window time U16 rw Y 0 ~ 65535 ms
6072h 00h Max torque U16 rw Y 0 ~ 65535 0.1%
6076h 00h Motor rated torque U32 ro - 0 ~ 4294967295 mNm
6077h 00h Torque actual value I16 ro Y -32768 ~ 32767 0.1%
607Fh 00h Max profile velocity U32 rw Y 0 ~ 4294967295 inc/s
6083h 00h Profile acceleration U32 rw Y 0 ~ 4294967295 inc/s
2
6084h 00h Profile deceleration U32 rw Y 0 ~ 4294967295 inc/s
2
6085h 00h Quick stop deceleration U32 rw Y 0 ~ 4294967295 inc/s
2
60C5h 00h Max acceleration U32 rw Y 0 ~ 4294967295 inc/s
2
60C6h 00h Max deceleration U32 rw Y 0 ~ 4294967295 inc/s
2
60FFh 00h Target velocity I32 rw Y -2147483648 ~ 2147483647 inc/s

 Loading...
Loading...


