Detailed Function Description
89
Optimize the responsiveness by adjusting these parameters while driving an actual load.
Adjusting PID control:
Use the following procedure to activate PID control and then adjust it while monitoring
the response.
1. Enabled PID control (P0.03=6)
2. Increase the proportional gain (Kp) as far as possible without creating oscillation.
3. Reduce the integral time (Ti) as far as possible without creating oscillation.
4. Increase the differential time (Td) as far as possible without creating oscillation.
Making fine adjustments:
First set the individual PID control constants, and then make fine adjustments.
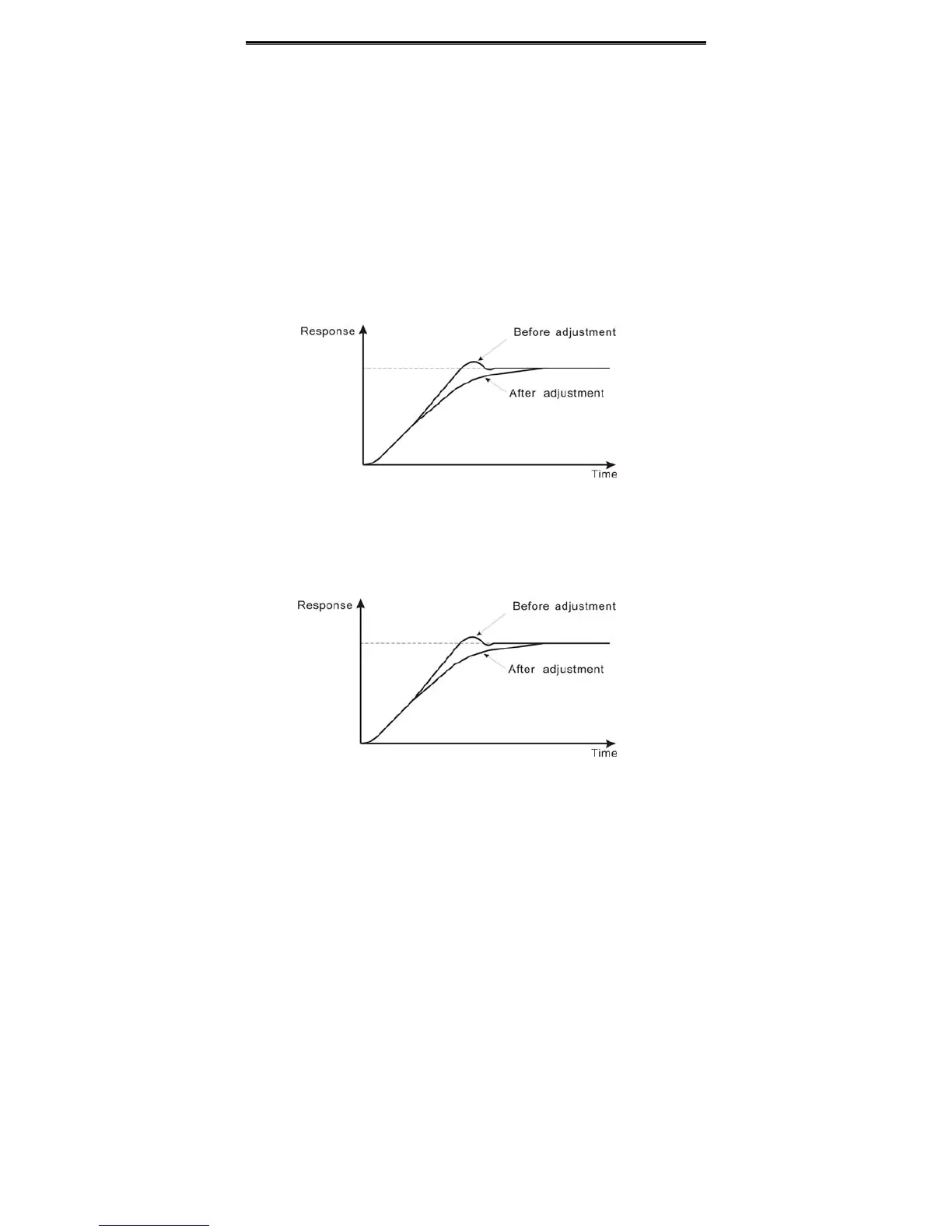
z Reducing overshooting
If overshooting occurs, shorten the differential time and lengthen the integral time.
Figure 6.28 Reducing overshooting diagram.
z Rapidly stabilizing control status
To rapidly stabilize the control conditions even when overshooting occurs, shorten the
integral time and lengthen the differential time.
Figure 6.29 Rapidly stabilizing diagram.
 Loading...
Loading...
