Parameter setting with the E82ZBC keypad
Vector control
8
Commissioning
8.4
8.4.2
L
8.4-4
EDS82EV903-1.0-11/2002
Switch-on sequence Comment
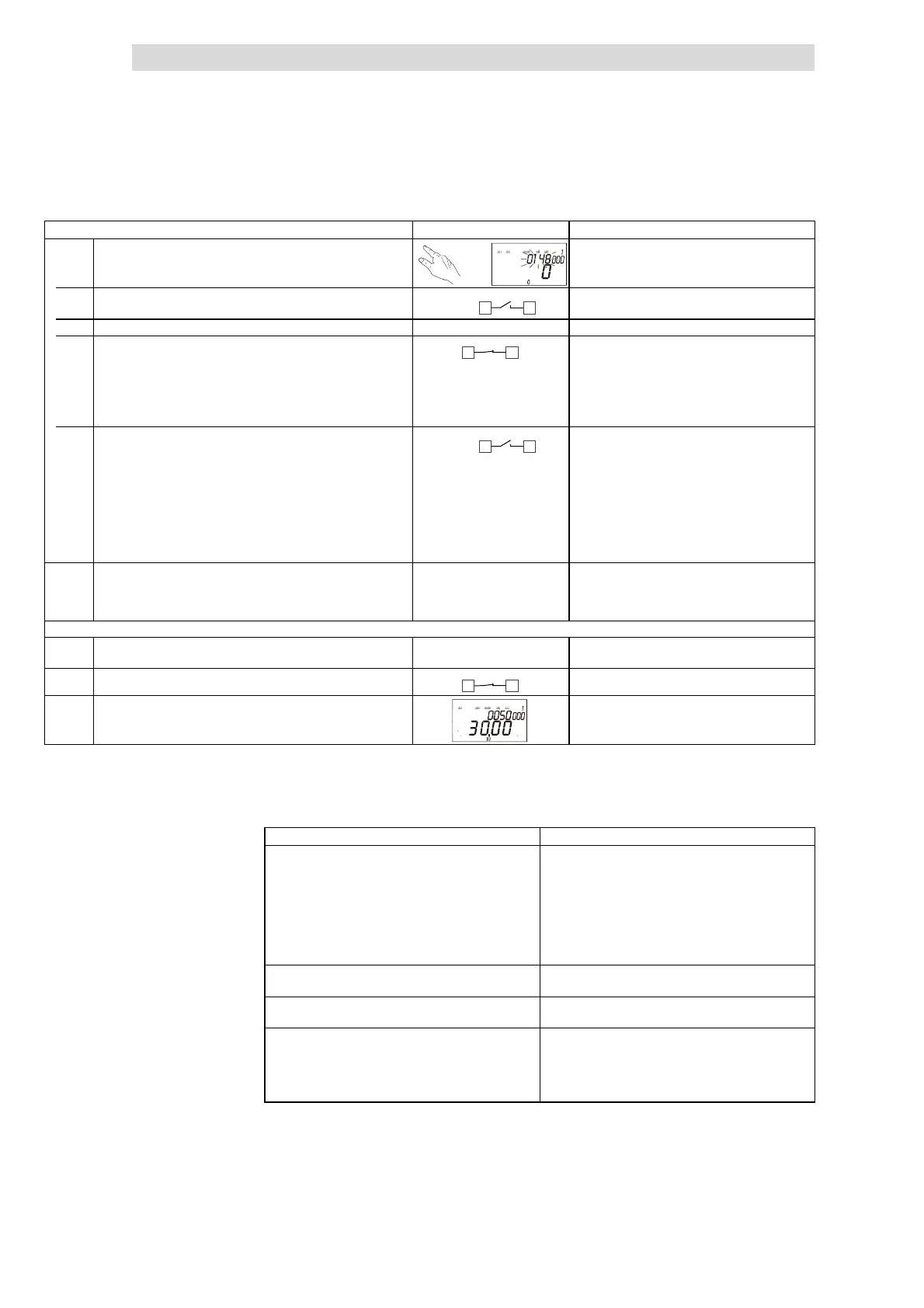
15. Start the motor paramete r identificatio n (C0148)
PS
mno
p
qr
Hi
Hz
Lo
Only when the motor is cold!
A) Ensure that the controller is inhibited
misc001
20 28
X3
}
Terminal X3/28 = LOW
B) Set C0148 = 1 Press v in addition
C) Enable the controller.
misc002
20
28
X3
• Terminal X3/28 = HIGH
• The identification starts:
– The segment
c is off
– The motor consumes current and makes a
“high-pitched” tone.
– The motor does not rotate!
D) If the segment c becomes active after approx. 30 s, inhibit the
controller once again
misc001
20 28
X3
}
• Terminal X3/28 = LOW
• Identification is completed.
• Calculated and stored:
– V/f rated fre quency (C0015)
– Slip compensation (C0021)
– Motor stator inductance (C0092)
• Measured and stored:
– Motor stator resistance (C0084) = Total
resistance of motor cable and motor
16. If necessary, adjust more parameters Activate e. g. JOG frequencies
(JOG) (C0037, C0038, C0039 or
motor parameter monitoring
(C0119)
After parameter setting:
17. Setpoint selection E.g. via potentiometer at
terminals7,8,9
18. Enable the controller.
20
28
X3
misc002
Terminal X3/28 = HIGH
19. The drive should now be running at e.g. 30 Hz
PS
mno
p
qr
Hi
Hz
Lo
If the drive does not start, press u in addition
In general, the vector control is ready for operation after the motor parameters
have been identified. Vectorcontrol must only be optimised forthe following drive
performance: 32
Drive performance Remedy
Rough motor run and motor current (C0054) > 60 %
rated motor current in idle running (stationary operation)
1. Reduction of motor inductance (C0092) by 10 %
2. Check of motor current under C0054
3. If the motor current (C0054) > 50 % of the rated
motor current:
– C0092 must be reduced until the mot or current
amounts to 50 % of the rated motor current
– Reduce C0092 by max. 20 %!
– Note: If you reduce C0092 the t o rque will decrease!
Torque too low for frequencies f < 5 Hz (starting torque) Increase of motor resistance (C0084) or increase of
motor inductance (C0092)
Poor constant speed at high loads (setpoint and motor
speed are not proportional).
Increase o f slip compensa t i on (C0021)
Overcompensation results in drive instability!
Error messages OC1, OC3, OC4 or OC5 during
acceleration times (C0012) < 1 s (drive controller is no
longer able to follow the dynamic processes)
Change readjustment time of the I
max
controller (C0078):
• Reduction o f C0078 = I
max
controller becomes quicker
(more dynamic)
• Increase of C0078 = I
max
controller becomes slower
(”smoother”)
Optimising the vector control
 Loading...
Loading...