Function library
Function blocks
3.5.67 Variable table − target position/position values (VTPOS)
3−278
l
EDSVS9332P−EXT DE 2.0
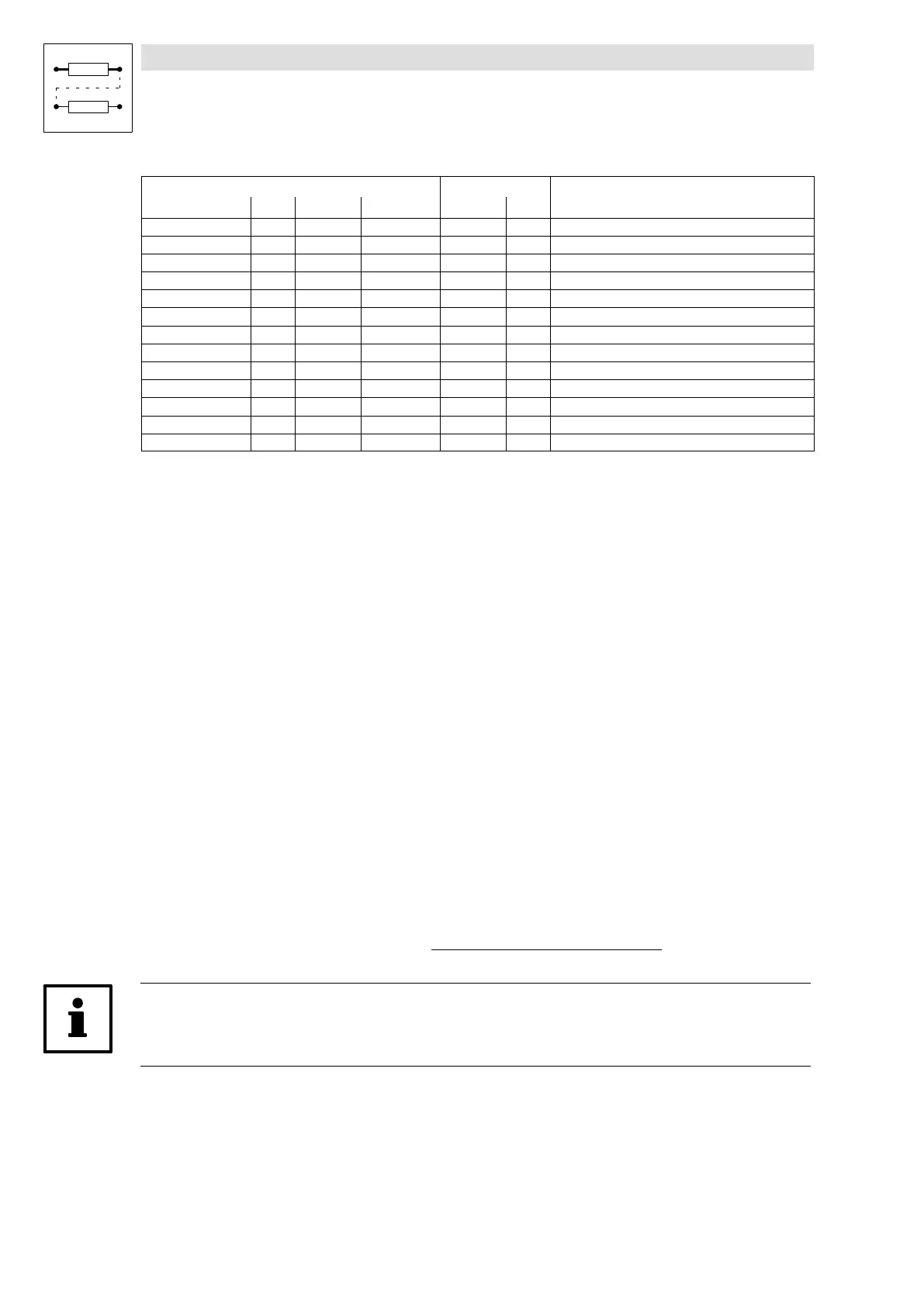
Signal Source Note
Name Type DIS DIS format CFG List
VTPOS−IN1 ph C1351/1 dec [inc] C1350/1 3 −
VTPOS−IN2 ph C1351/2 dec [inc] C1350/2 3 −
VTPOS−IN3 ph C1351/3 dec [inc] C1350/3 3 −
VTPOS−IN4 ph C1351/4 dec [inc] C1350/4 3 −
VTPOS−IN5 ph C1351/5 dec [inc] C1350/5 3 −
VTPOS−IN6 ph C1351/6 dec [inc] C1350/6 3 −
VTPOS−IN7 ph C1351/7 dec [inc] C1350/7 3 −
VTPOS−IN8 ph C1351/8 dec [inc] C1350/8 3 −
VTPOS−IN9 ph C1351/8 dec [inc] C1350/9 3 −
VTPOS−IN10 ph C1351/10 dec [inc] C1350/10 3 −
VTPOS−OUT1 ph − − − − −
... ...
VTPOS−OUT104 ph − − − − −
Function
A total of 104 table positions are available.
l Enter fixed target position values via C1301/x.
– 60 table positions (VTPOS−No1 ... VTPOS−No60) are available.
– Subcodes (C1301/1 ... C1301/60) define the table position number.
l Enter variable target position values via VTPOS−INx.
– 10 table positions (VTVEL−No61 ... VTVEL−No70) are available.
– Signal input via function blocks.
– The target position value must be transmitted to the table positions before the
corresponding program set starts and accesses these values.
l Enter target position values of FB TEACH1.
– 30 table positions (VTPOS−No71 ... VTPOS−No100) are available.
l Enter target position values via touch probe.
– 4 table positions (VTPOS−No101 ... VTPOS−No104) are available.
l C1380 displays the target position values (in units) on the table positions.
– Select table position (C1380/1 ... C1380/104) with subcode.
l C1381 displays the target position values (in inc) on the table positions.
– Select table position (C1381/1 ... C1381/104) with subcode.
l The conversion from target position [units] to target position [inc] is performed according to
the formula:
Targetposition[inc] + Targetposition[units] @
65536[incńr] @ gearnominator
Feedconst.[unitsńr] @ geardenominator
Tip!
Entries into the processing table are only required if FB inputs are used.