Function library
Positioning control
3.4.9 Travel profile generator and setpoints
3−59
l
EDSVS9332P−EXT DE 2.0
l Traversing profile parameters can be changed via input POS−PARAM−RD even during a
positioning process.
Stop!
For the "Manual jog function with intermediate stop", POS−PARAM−RD has to be set = LOW.
Function
l Linear ramps (L profile) ( 3−59)
l S ramps (S profile) ( 3−60)
l Override (POS−V−OVERRID, POS−A−OVERRID) ( 3−62)
l New traversing profile parameters during positioning (POS−PARAM−RD) ( 3−58)
l Influence of precontrol values (POS−NOUT−GAIN, POS−MOUT−GAIN) ( 3−62)
l Target window (POS−WAITSTATE) ( 3−64)
l Virtual master (POS−PHI−SET) ( 3−65)
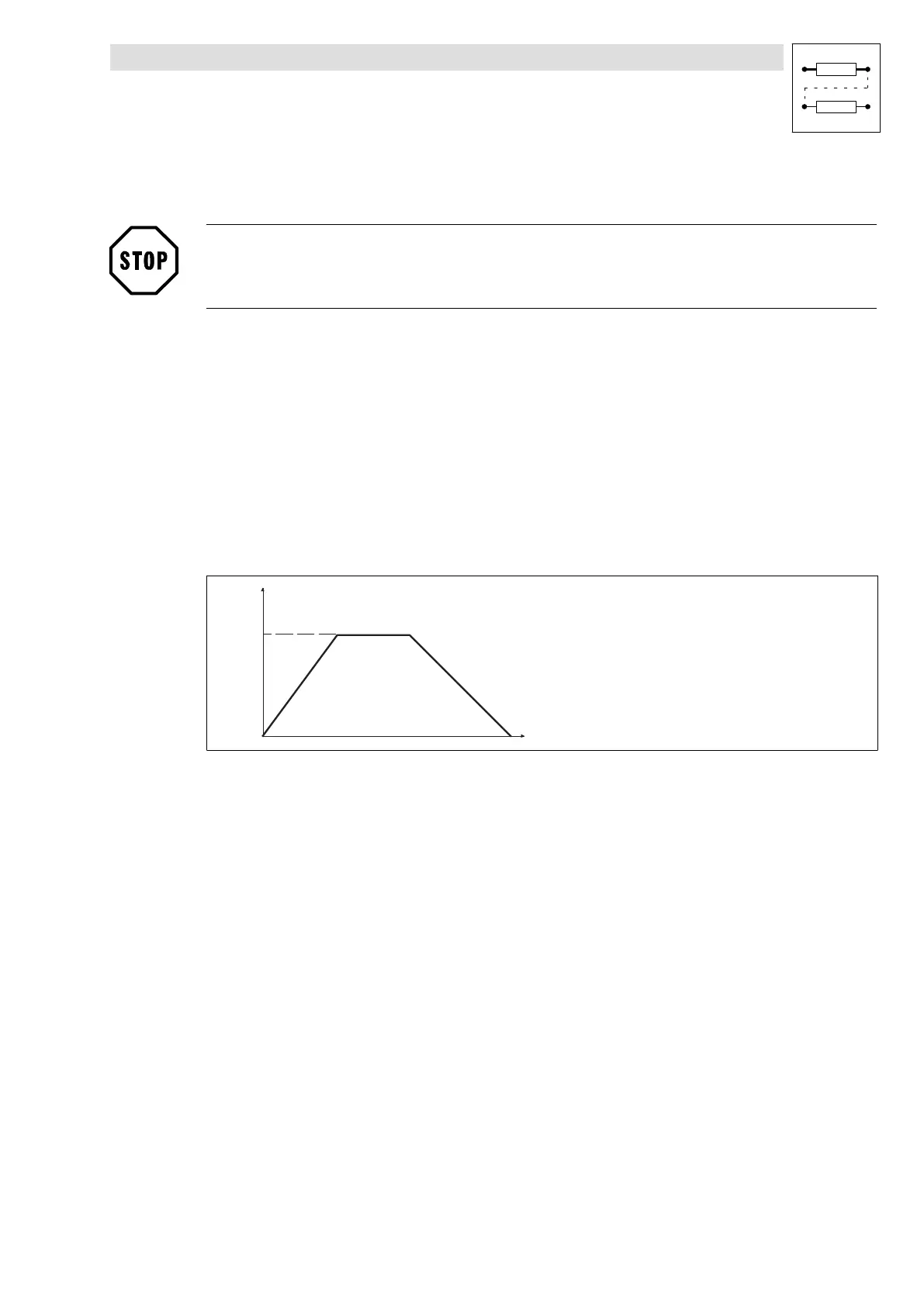
3.4.9.1 Linear ramps (L profile)
9300POS026
t
v
- V T A C C
+ V T A C C
V T V E L
VTVEL =
+ VTACC =
− VTACC =
Traversing speed
Acceleration
Deceleration
Fig. 3−22 Linear ramps (L profile)
l
The profile generator works on an optimum time base using the L profile, i.e. the target
position can be reached as quickly as possible with the acceleration and speed selected.
l The acceleration selected is effective immediately when the velocity is changed.
l Default setting: L profile.
 Loading...
Loading...

