MDS-E/EH Series Instruction Manual
7 Troubleshooting
376
IB-1501229-F
7.2 Protective Functions List of Units
7.2.1 List of Alarms
When an alarm occurs, the servo drive unit will make the motor stop by the deceleration control or dynamic brake. The
spindle drive unit will coast to a stop or will decelerate to a stop. At the same time, the alarm No. will appear on the NC
monitor screen and with the LEDs on the front of the drive unit. Check the alarm No., and remove the cause of the alarm
by following this list.
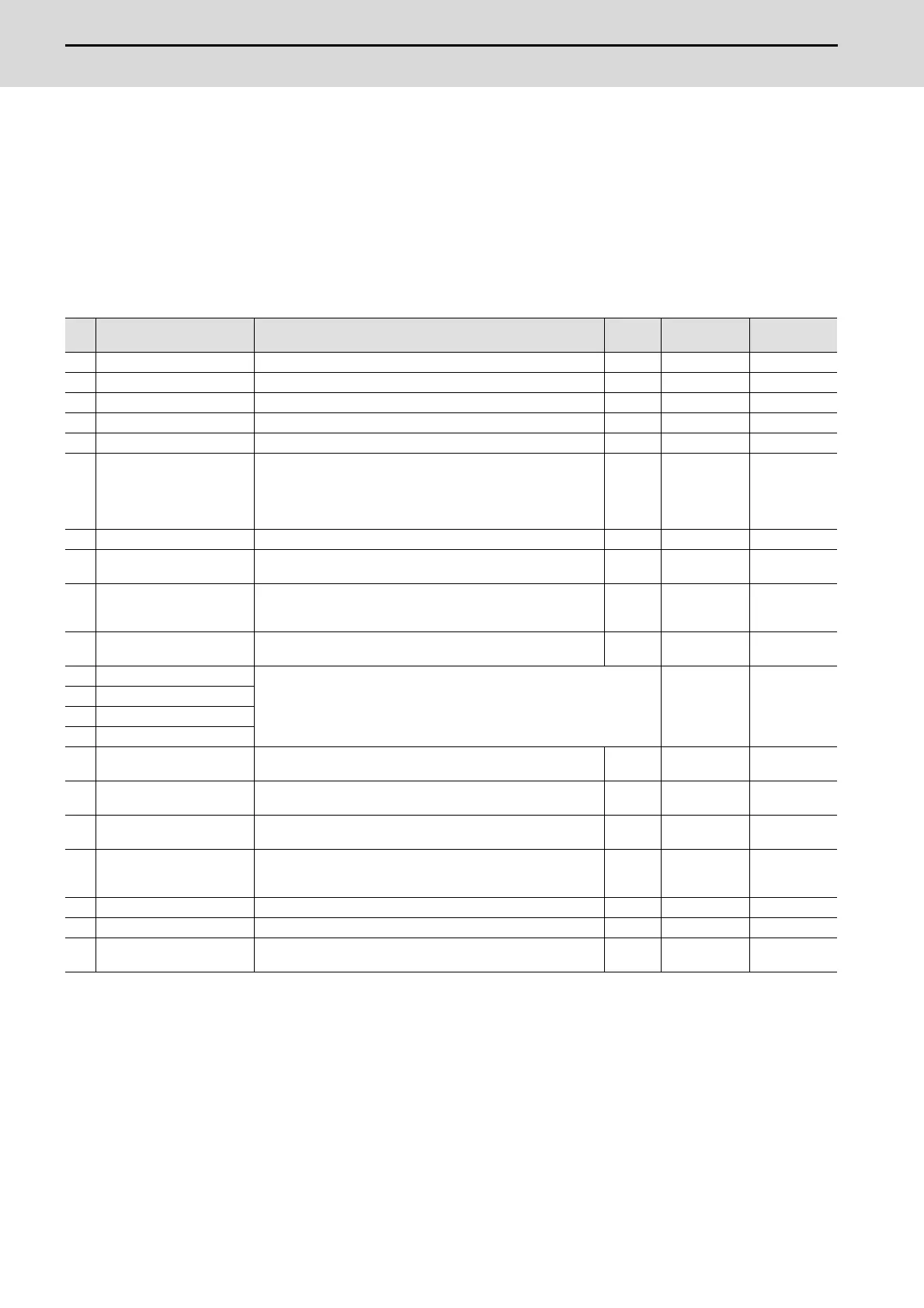
(1) Drive unit alarm
(Note 1) Definitions of terms in the table are as follows.
Main side encoder: Encoder connected to CN2
Sub side encoder: Encoder connected to CN3
(Note 2) Resetting methods
NR: Reset with the NC RESET button. This alarm can also be reset with the PR and AR resetting conditions.
PR: Reset by turning the NC power ON again. This alarm can also be reset with the AR resetting conditions.
When the control axis is removed, this alarm can be reset with the NC RESET button. (Excluding alarms 32 and 37.)
AR: Reset by turning the NC and servo drive unit power ON again.
No. Name Details
Reset
method
Servo
stop method
Spindle
stop method
10 Insufficient voltage A drop of bus voltage was detected in main circuit. PR Dynamic stop Coast to a stop
11 Axis selection error The axis selection rotary switch has been incorrectly set. AR Initial error Initial error
12 Memory error 1 A hardware error was detected during the power ON self-check. AR Initial error Initial error
13 Software processing error 1 An error was detected for the software execution state. PR Dynamic stop Coast to a stop
14 Software processing error2 The current processor is not operating correctly. AR Dynamic stop Coast to a stop
16 Initial magnetic pole position
detection error
In the built-in motor which uses the absolute position encoder,
the servo ON has been set before the magnetic pole shift
amount is set.
The magnetic pole position, detected in the initial magnetic pole
position detection control, is not correctly set.
PR Dynamic stop Coast to a stop
17 A/D converter error A current feedback error was detected. PR Dynamic stop Coast to a stop
18 Main side encoder:
Initial communication error
An error was detected in the initial communication with the mo-
tor side encoder.
PR Initial error Initial error
19 Encoder communication er-
ror in synchronous control
An error of the shared encoder on the machine side was detect-
ed on the secondary axis of the speed command synchroniza-
tion control.
PR Dynamic stop -
1A Sub side encoder:
Initial communication error
An error was detected in the initial communication with the ma-
chine side encoder.
PR Initial error Initial error
1B Sub side encoder: Error 1 An error was detected by the encoder connected to the machine side.
The error details are different according to the encoder type.
Refer to "Encoder alarm" for details.
Dynamic stop Coast to a stop
1C Sub side encoder: Error 2
1D Sub side encoder: Error 3
1E Sub side encoder: Error 4
1F Sub side encoder:
Communication error
An error was detected in the communication with the machine
side encoder.
PR Dynamic stop Coast to a stop
21 Sub side encoder no signal
2
In the machine side encoder, ABZ-phase feedback cannot be
returned even when the motor moves.
PR Dynamic stop Coast to a stop
22 Encoder data error An error was detected in the feedback data from the position en-
coder.
AR Dynamic stop -
23 Excessive speed error The state that there is a difference between the actual speed
and command speed continued for longer than the excessive
speed deviation timer setting.
NR - Coast to a stop
24 Grounding The motor power cable is in contact with FG (Frame Ground). PR Dynamic stop Coast to a stop
25 Absolute position data lost The absolute position data was lost in the encoder. AR Initial error -
26 Unused axis error In the multiaxis drive unit, there is an axis set to free, and the
other axis detected a power module error.
PR Dynamic stop Coast to a stop
 Loading...
Loading...



