8-79
8 Pulse Outputs
CJ2M CPU Unit Pulse I/O Module User’s Manual
8-9 Application Example
8
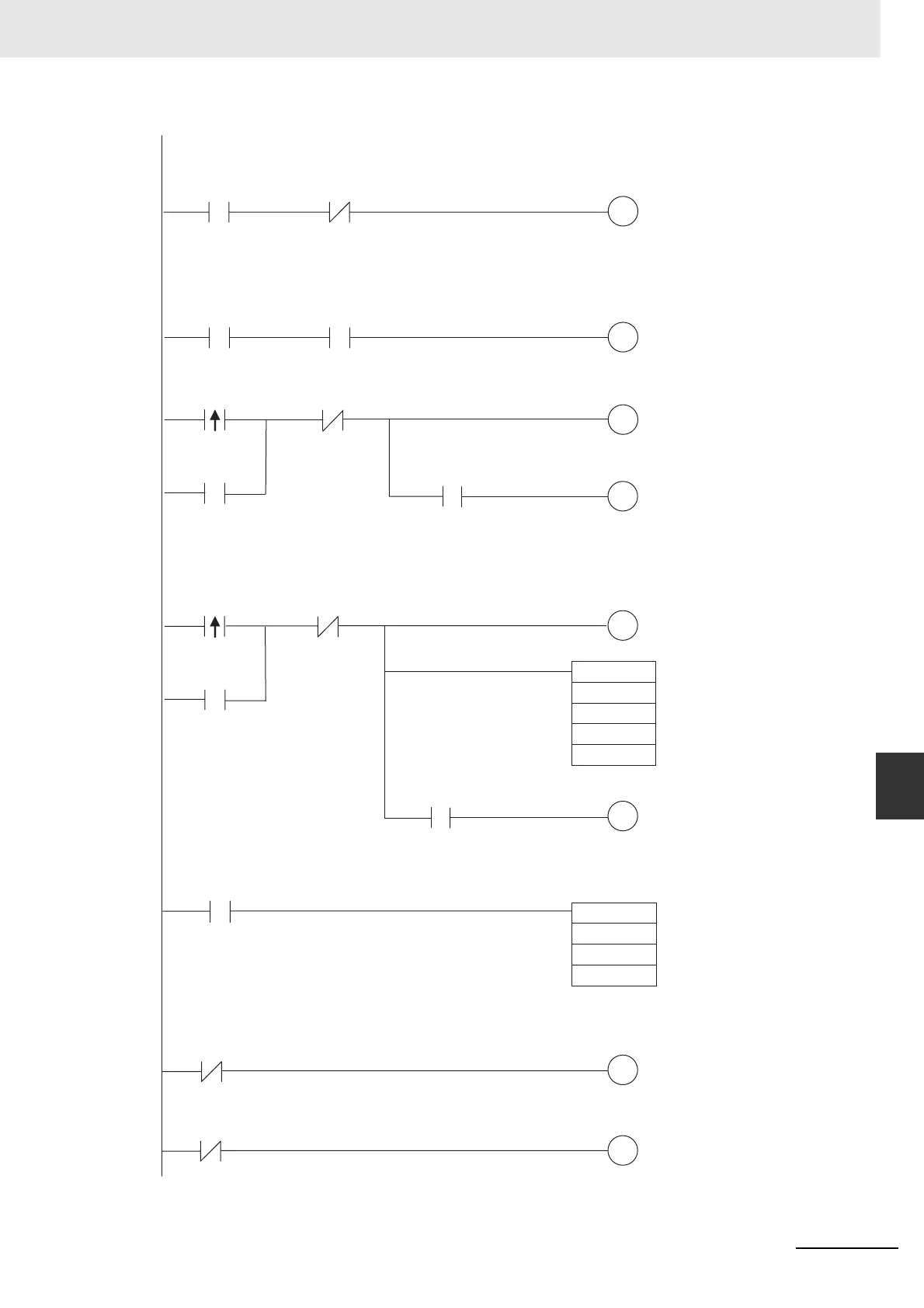
8-9-3 Vertically Conveying PCBs (Multiple
Progressive Positioning)
A540.08
W0.04 C000
C000W0.04
W0.06 W0.07
W0.05
W0.06
1.01
W0.09
W0.09
W0.07
W0.07
W0.08
W0.08
A280.03
0.01
2960.06
2960.07
A540.09
@PLS2
#0000
#0001
D10
D16
@INI
#0000
#0003
0
1.01
0.03
When the stocker is not full (C0 = OFF), store PCB,
and repeat lift positioning after PCB storage is completed.
Lift positioning
completed
Lift positioning
completed
Stocker full
Stocker full
When the stocker is full (C0 = ON), move the stocker,
and start lower positioning after stocker movement is completed.
Stocker
moved
Lower
positioning
Stocker movement
output
Stocker movement completed
Positioning
Lower to "0" position (absolute pulses)
Lower positioning
completed
Lower positioning
start
Lower positioning in
progress
Pulse output completed
Immediate stop (Pulse output stopped)
Repeat limit input settings
Limit inputs are allocated to external sensors using the following programming.
Immediate stop switch
Pulse input
Pulse input
CW limit input signal
CCW limit input signal
Lower positioning completed
Lower positioning in progress
Lower positioning
PCB stored
Stocker movement output
Stocker moved
Mode Control
Port specifier: Pulse output 0
Control data: Stop pulse output
Positioning
Port specifier: Pulse output 0
Control data
First word of setting table
First starting frequency word

 Loading...
Loading...



