6-16
6-6 Fully-closed Control
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
6
Drive Profile
External Feedback Pulse Dividing Ratio Setting (3324 Hex, 3325 Hex)
Set the dividing ratio for the encoder resolution and external encoder resolution.
Check the number of encoder feedback pulses and the number of external encoder output
pulses per motor rotation, and set the External Feedback Pulse Dividing Numerator (3324 hex)
and External Feedback Pulse Dividing Denominator (3325 hex) the so that the following
equation is true.
Precautions for Correct Use
If this divider setting is wrong, there will be error between the position calculated from encoder
pulses and the position calculated from external encoder pulses. If the movement distance is long,
this error accumulates and causes a Excessive Hybrid Deviation Error (error 25.0).
The recommended divider setting is 1/40 ≤ External Feedback Pulse Ratio ≤ 160. If the ratio is set
too small, control to the unit of 1 external feedback pulse may be disabled. On the other hand, if
the external feedback pulse ratio is increased, operating noise may increase.
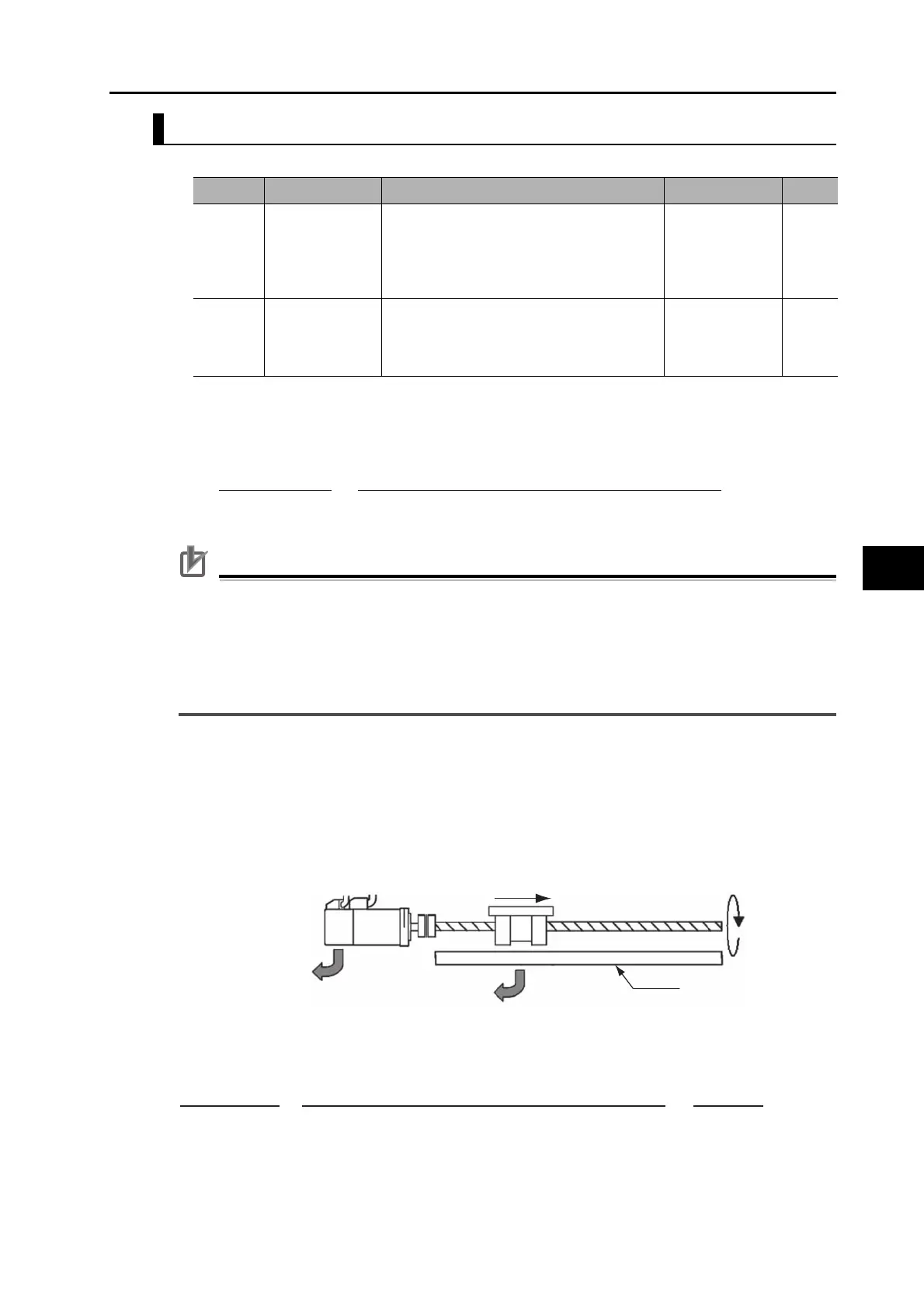
Setting Example
Ball screw pitch: 10 mm
External encoder resolution: 0.1 µm
Encoder resolution: 20 bits
Index Name Description Setting range Unit
3324 hex
External
Feedback Pulse
Dividing
Numerator
Set the numerator of the external feedback
pulse divider setting. Normally, set the
number of encoder output pulses per motor
rotation. If the set value is 0, the encoder
resolution is set automatically.
0 to 1,048,576 −
3325 hex
External
Feedback Pulse
Dividing
Denominator
Set the denominator of the external
feedback pulse divider setting. Normally, set
the number of external encoder output
pulses per motor rotation.
1 to 1,048,576 −
=
Encoder resolution per motor rotation [pulses]
External encoder resolution per motor rotation [pulses]
Object 3324 hex
Object 3325 hex
Servomotor
Encoder resolution: 20 bits/rotation
10 mm
Ball screw
Ball screw pitch: 10 mm
1 rotation
External encoder
resolution: 0.1
µ
m
External Encoder Output Pulse per Motor Rotation (3325 hex)
10 [mm]/0.1 [
µ
m/pulse] = 100,000 [pulses]
Encoder Output Pulses per Motor Rotation (3324 hex)
20 bits = 1,048,576
Object 3325 hex
Object 3324 hex
=
100000
1048576
Encoder resolution per motor rotation [pulses]
External encoder resolution per motor rotation [pulses]
=

 Loading...
Loading...





