6-12
6-6 Fully-closed Control
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
6
Drive Profile
6-6 Fully-closed Control
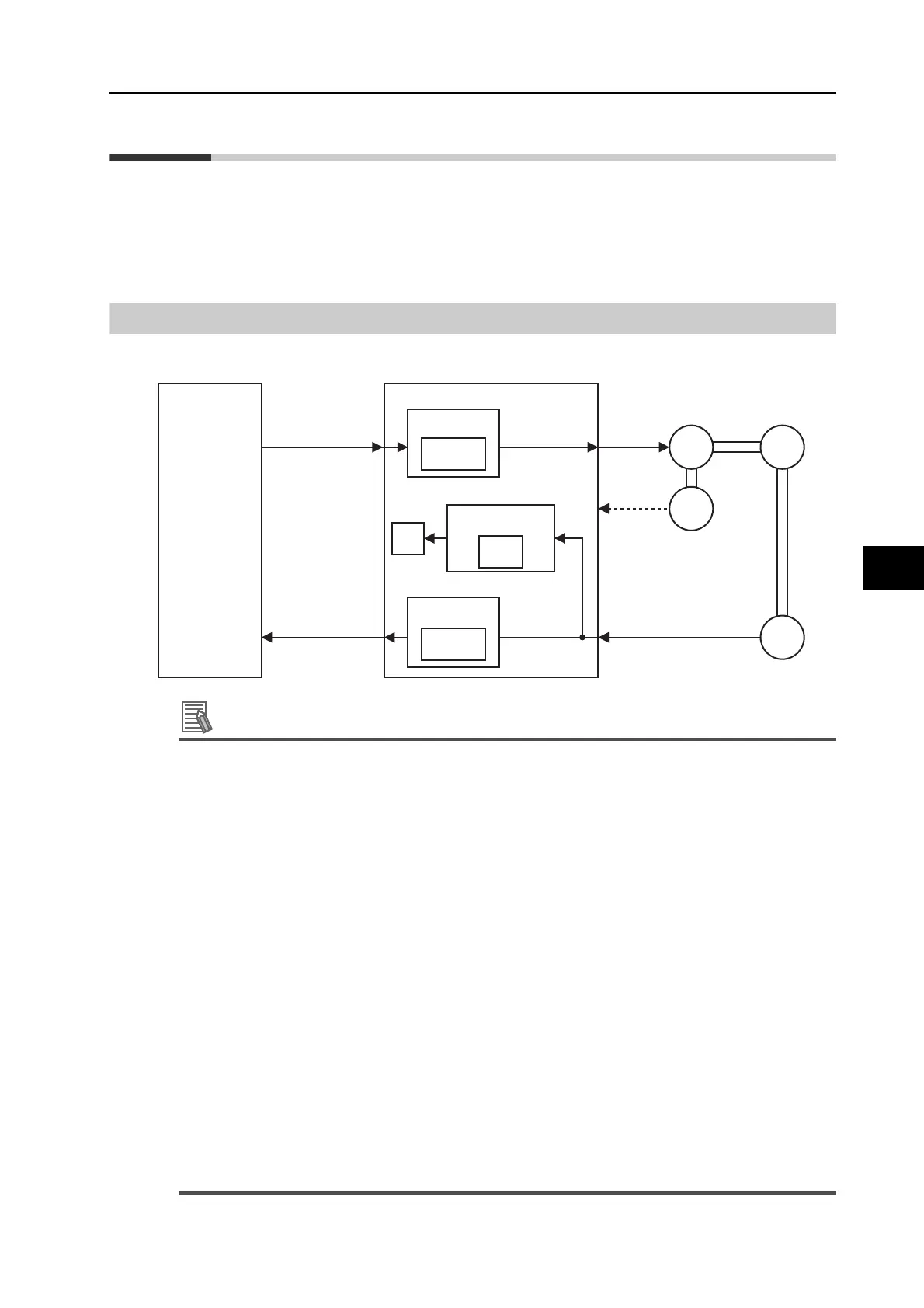
An externally provided encoder is used to directly detect the position of the control target and
feedback the detected machine position to perform position control. This way, controls can be
performed without being affected by ball screw error, temperature changes, etc. You can
achieve highly accurate positioning by configuring a fully-closed control system.
Outline of Operation
Reference
If the Gear ratio (6091-01 and 6091-02 hex) is 1:1, 1 command unit from the Target position (607A
hex) is equivalent to a movement of 1 external encoder pulse.
Set the External Feedback Pulse Dividing Ratio (3324 and 3325 hex) according to External
Feedback Pulse Dividing Ratio Setting (3324 Hex, 3325 Hex) on page 6-16.
Set the Hybrid Following Error Counter Overflow Level (3328 hex) and Hybrid Following Error
Counter Reset (3329 hex) according to Hybrid Error Setting (3328 Hex, 3329 Hex) on page 6-17
------
------
------
Position Control Unit
CJ1W-NC@8@
Servo Drive
R88D-KN@-ECT-R
Electronic gear
forward conversion
6091h-01h
6091h-02h
Electronic gear
reverse conversion
6091h-02h
6091h-01h
External feedback
pulse dividing ratio
3324h
3325h
Motor
Motor
current
Encoder
Load
External
encoder
Host Controller with
EtherCAT Communications
Target position
(607A hex)
[command units]
Position actual value
(6064 hex)
[command units]
Internal
circuits
Position actual internal
value (6063 hex)
[external encoder units]
Example for an External Encoder with a Resolution of 0.1 µm
Gear ratio (6091-01 and 6091-02 hex) of 1:1:
The external encoder executes positioning for 10 µm when 100 command units are
applied as the Target position (607A hex).
100 command units × 1:1 (Gear ratio) × 0.1 µm = 10 µm
Here, 100 command units are returned to the host controller as the Position actual value
(6064 hex).
Gear ratio (6091-01 and 6091-02 hex) of 1:2:
The external encoder executes positioning for 10 µm when 200 command units are
applied as the Target position (607A hex).
200 command units × 1:2 (Gear ratio) × 0.1 µm = 10 µm
Here, 200 command units are returned to the host controller as the Position actual value
(6064 hex).

 Loading...
Loading...





