5-20
5-3-11 Gain Switched
PI/P control mode selection (Section A)
Automatic gain 1& 2 switch (Section B)
The selection of PI/P control mode switch and Automatic gain 1& 2 switch by parameters or from
input terminals can be used in following conditions.
(1) In speed control, to restrain acceleration/deceleration overshooting.
(2) In position control, to restrain oscillations and decrease the adjusting time.
(3) To decrease the possible noise caused by using Servo Lock function.
(A) Switching between PI/P Control modes
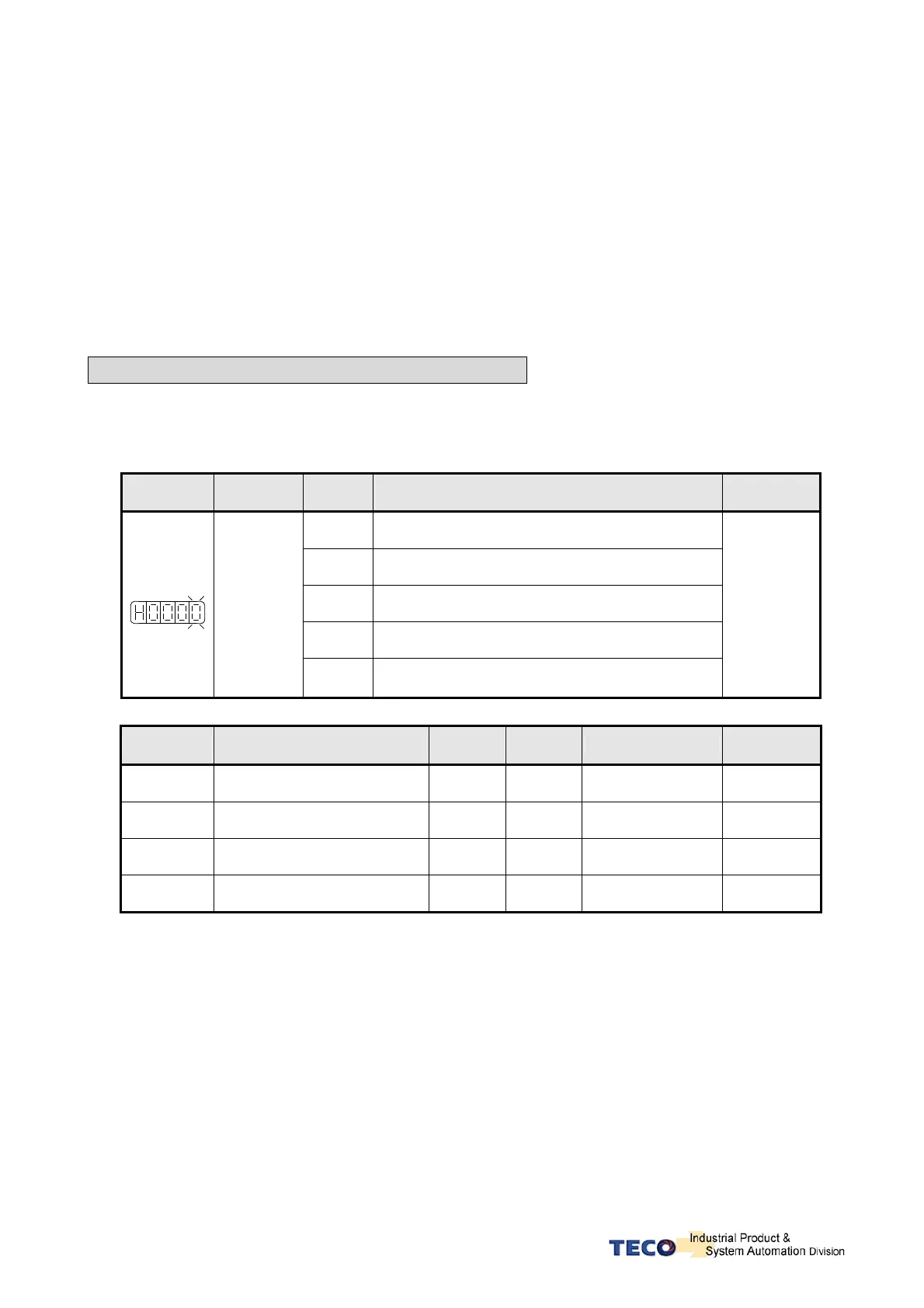
Switch over from PI to P mode is determined by setting of parameter Cn015.0 and according to
the selection options below:
Parameter
Signal
Name Setting Description
Control
mode
0
Switch from PI to P if the torque command is
greater than Cn016
1
Switch from PI to P if the speed command is
greater than Cn017
2
Switch from PI to P if the acceleration command is
greater than Cn018
3
Switch from PI to P if the position error is greater
than Cn019
Cn015.0
PI/P control
mode
switch
4
Switch from PI to P by the input contact PCNT.
Set one of the multi function terminals to option 03.
Pi/Pe/S
Parameter Name Default Unit Setting range
Control
mode
Cn016
PI/P control mode switch by
(torque command)
200 % 0~399 Pi/Pe/S
Cn017
PI/P control mode switch by
(speed command)
0 rpm 0~4500 Pi/Pe/S
Cn018
PI/P control mode switch by
(acceleration)
0 rps/s 0~18750 Pi/Pe/S
Cn019
PI/P control mode switch by
(position error value)
0 pulse 0~50000 Pi/Pe/S

 Loading...
Loading...
