5-75
5-6-11 Analog Monitor
There are two analog output signals which can be used to monitor running Speed, Torque, Current and
Position as follows:
Parameters Name & Function
Default Unit
Setting
Range
Control
Mode
Analog monitor output selection (MON1)
Setting Explanation
0
Speed command
(±10V/1.5 times of the rated speed)
1
Speed feedback detection
(±10V/1.5 times of the rated speed)
2
Torque command
(±10V/1.5 times of the rated torque)
3
Torque feedback detection
(±10V/1.5 times of the rated torque)
4 Pulse command input
5 Position deviation value
6 Electrical angle
7 Main circuit (Vdc Bus) voltage
8
Speed command
(+10V/3.5 times of the rated torque)
9
Speed feedback detection
(+10V/1.5 times of the rated speed)
A
Torque command
(+10V/3.5 times of the rated torque)
Cn006.0
B
Torque feedback detection
(±10V/3.5 times of the rated torque)
2
Analog monitor output selection MON2
Cn006.1
Refer to Cn006.0 for setting this parameter
0
X
0
│
B
ALL
Analog monitor output ratio (MON1)
Cn043
For example,the Analog monitor output ratio is 10V/1.5 times
speed when we set 100%, if we want 10V/0.75 times speed,
please set 200%
100 %
1
│
1000
ALL
Analog monitor output ratio (MON2)
Cn044
Please refer to Cn043.
100 %
1
│
1000
ALL
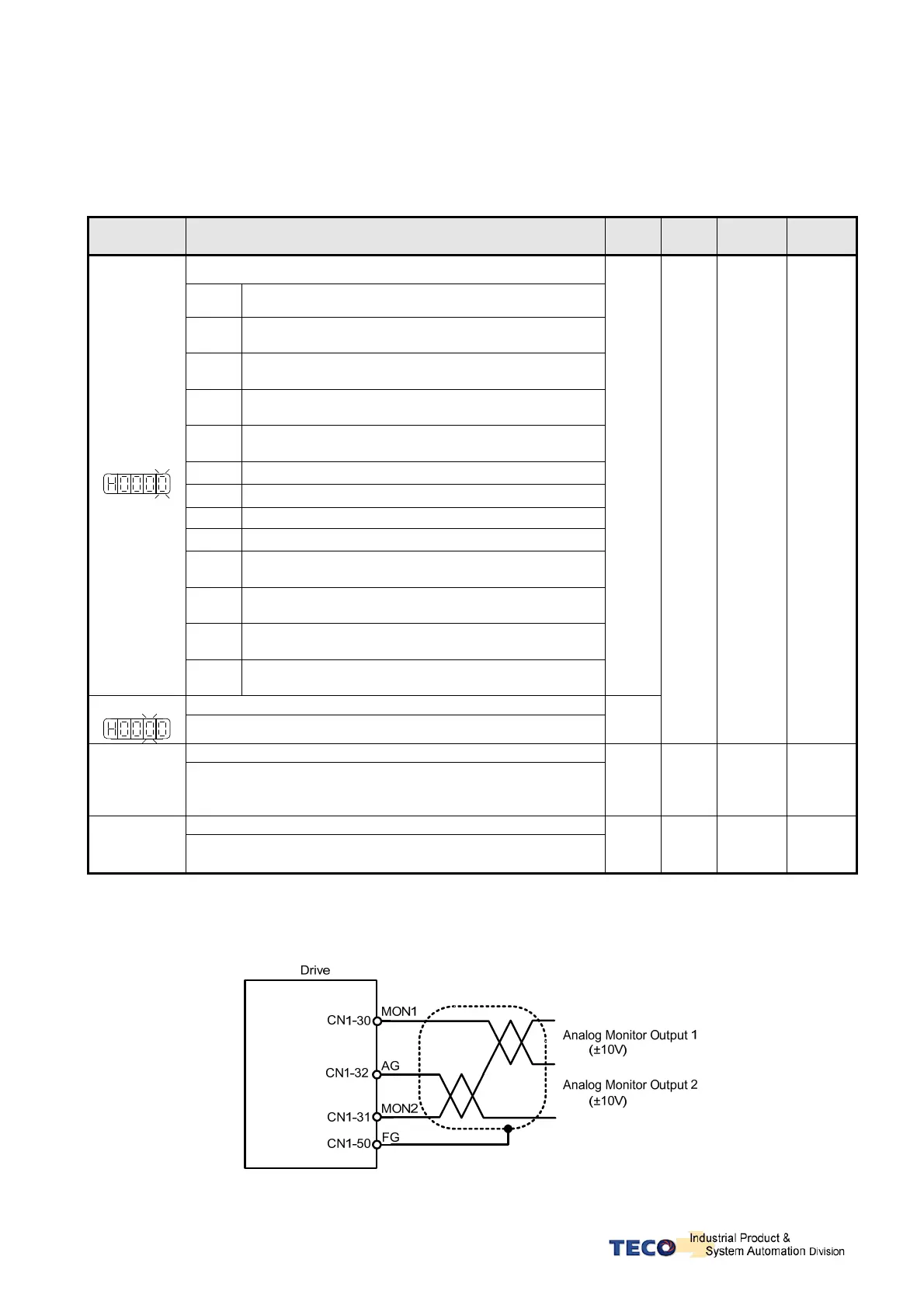
Circuit diagram for analog monitor shows below:

 Loading...
Loading...
