<APPENDIX 8. PID BLOCK>
A8-5
IM 01F06F00-01EN
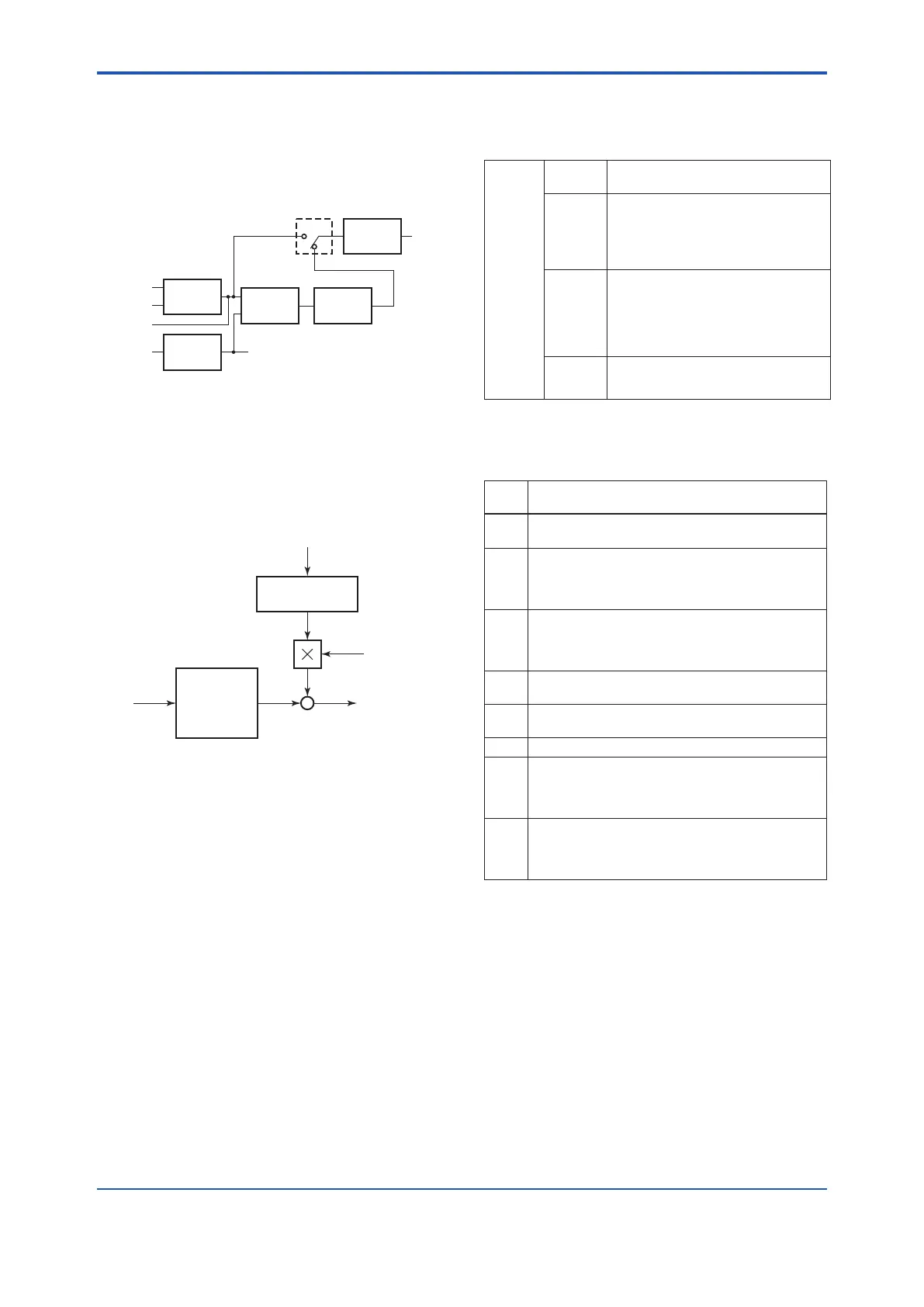
A8.7 Control Action Bypass
The PID control computation can be bypassed so
as to set the SP value in the control output OUT as
shown below. Setting BYPASS to “On” bypasses
the PID control computation.
Setpoint
Control
Feed-
forward
CAS_IN
Filter
IN PV
SP
RCAS_IN
Output
OUT
A8.8 Feed-forward
Feed-forward is an action to add a compensation
input signal FF_VAL to the output of the PID control
computation, and is typically used for feed-forward
control. The following gure illustrates the action.
PID
computation
FF_SCALE
OUT_SCALE
PV OUT
FF_VAL
FF_GAIN
FA0805.ai
A8.9 Block Modes
The block mode is set in the parameter MODE_
BLK.
MODE_
BLK
Target Stipulates the target mode to which the
PID block transfers.
Actual Indicates the current mode of the PID
block.
Permitted
Stipulates all the modes that the PID
block can enter. The PID block is
prohibited to enter any mode other than
those set in this element.
Normal Stipulates the mode in which the PID
block normally resides.
There are eight modes for a PID block as shown
below.
Block
Mode
Description
ROut Remote output mode, in which the PID block outputs
the value set in ROUT_IN.
RCas Remote cascade mode, in which the PID block carries
out the PID control computation based on the setpoint
(SP) set via the remote cascade connection, such as
from a computer, and outputs the computed result.
Cas Cascade mode, in which the PID block carries out the
PID control computation based on the setpoint (SP) set
from another eldbus function block, and outputs the
computed result.
Auto The PID block carries out automatic control and outputs
the result computed by the PID control computation.
Man Manual mode, in which the PID block outputs the value
set by the user manually.
LO The PID block outputs the value set in TRK_VAL.
IMan Initialization and manual mode, in which the control
action is suspended. The PID block enters this mode
when the specied condition is met (Read APPENDIX
8.14 “Initialization and Manual Fallback (IMAN)”).
O/S Out of service mode, in which neither the control
computation nor action is carried out, and the output is
kept at the value that was output before the PID block
entered into O/S mode.

 Loading...
Loading...