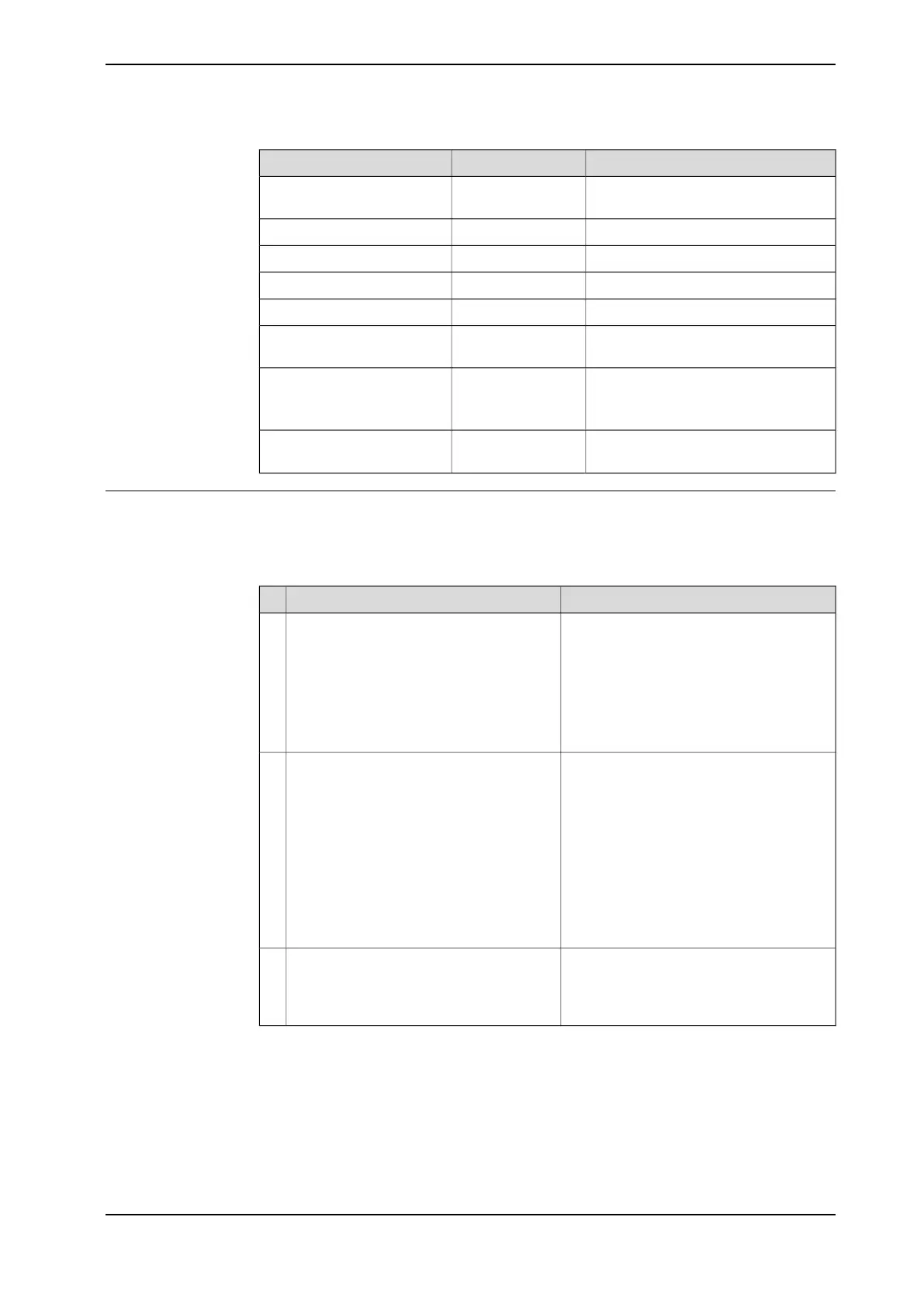
NoteArticle numberEquipment, etc.
Length: 140 mm.-Long AllenKeySocketIN19L
6-140
Always use guide pins in pairs.3HAC15520-1Guide pin, M8x100
Used to rotate the motor pinion.3HAB7887-1Rotation tool
Used to release the motor brakes.-24 VDC power supply
-Leak-down tester
Required if Calibration Pendulum is the
valid calibration method for the robot.
3HAC15716-1Calibration Pendulum toolkit
Delivered as a set of calibration tools.
Required if Axis Calibration is the valid
calibration method for the robot.
3HAC055412-001Calibration tool box, Axis
Calibration
Content is defined in section Standard
toolkit on page 829.
-Standard toolkit
Deciding calibration routine
Decide which calibration routine to be used, based on the information in the table.
Depending on which routine is chosen, action might be required prior to beginning
the repair work of the robot, see the table.
NoteAction
Decide which calibration routine to use for
calibrating the robot.
• Reference calibration. External cable
packages (DressPack) and tools can
stay fitted on the robot.
• Fine calibration. All external cable
packages (DressPack) and tools
must be removed from the robot.
1
Follow the instructions given in the refer-
ence calibration routine on the FlexPendant
to create reference values.
If the robot is to be calibrated with refer-
ence calibration:
Find previous reference values for the axis
or create new reference values. These val-
ues are to be used after the repair proced-
ure is completed, for calibration of the ro-
bot.
Creating new values requires possibility to
move the robot.
Read more about reference calibration for
Axis Calibration in Reference calibration
routine on page 799.If no previous reference values exist, and
no new reference values can be created,
then reference calibration is not possible.
Read more about reference calibration for
Pendulum Calibration in Operating manu-
al - Calibration Pendulum.
If the robot is to be calibrated with fine
calibration:
Remove all external cable packages
(DressPack) and tools from the robot.
Continues on next page
Product manual - IRB 6700 555
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
4 Repair
4.7.5 Replacing the axis-5 motor
Continued

 Loading...
Loading...





