2.4.5 Orienting and securing the robot
General
This section details how to orient and secure the robot to the base plate in order
to run the robot safely.
It also contains information about securing the robot to a track motion.
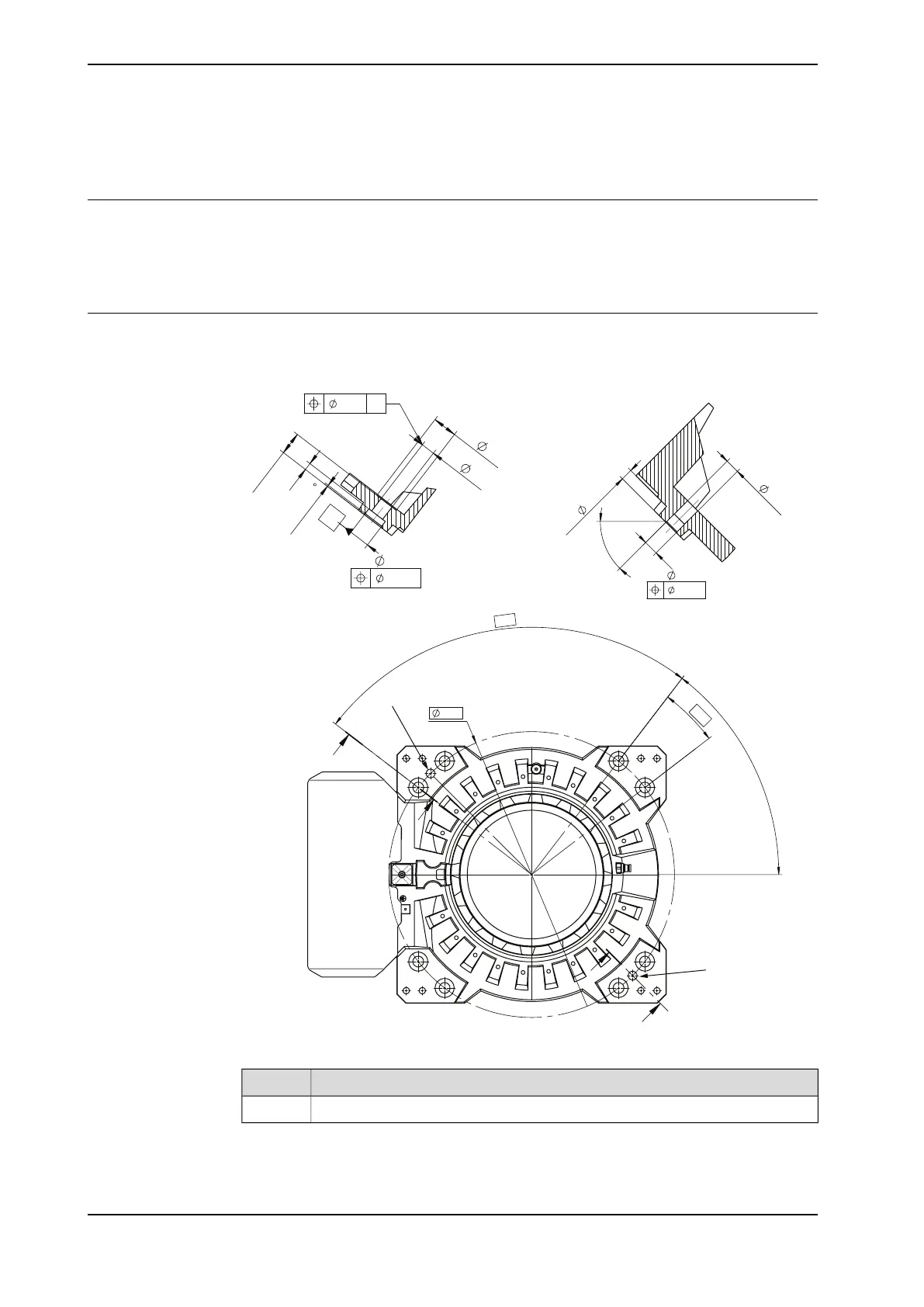
Hole configuration, base
The figure shows the hole configuration used when positioning and securing the
robot.
D - D
8x
3
0
8x
5
3
4x
45 H7
4x 3x45
16
8x
49,5
0,3
A
0,12
A
800
4x
90°
52,5°
4x
15°
D
D
E
E
2x
25 H8
20 (
25 H8)
2x45°
24,5
2x
0,12
E - E
(A)
(A)
xx1300000243
DescriptionPos
Holes for guide pins (x2)A
Continues on next page
80 Product manual - IRB 6700
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
2 Installation and commissioning
2.4.5 Orienting and securing the robot
 Loading...
Loading...






