Summary of the replacement procedure
This list is a brief summary of the replacement procedure, containing the major
actions to be performed.
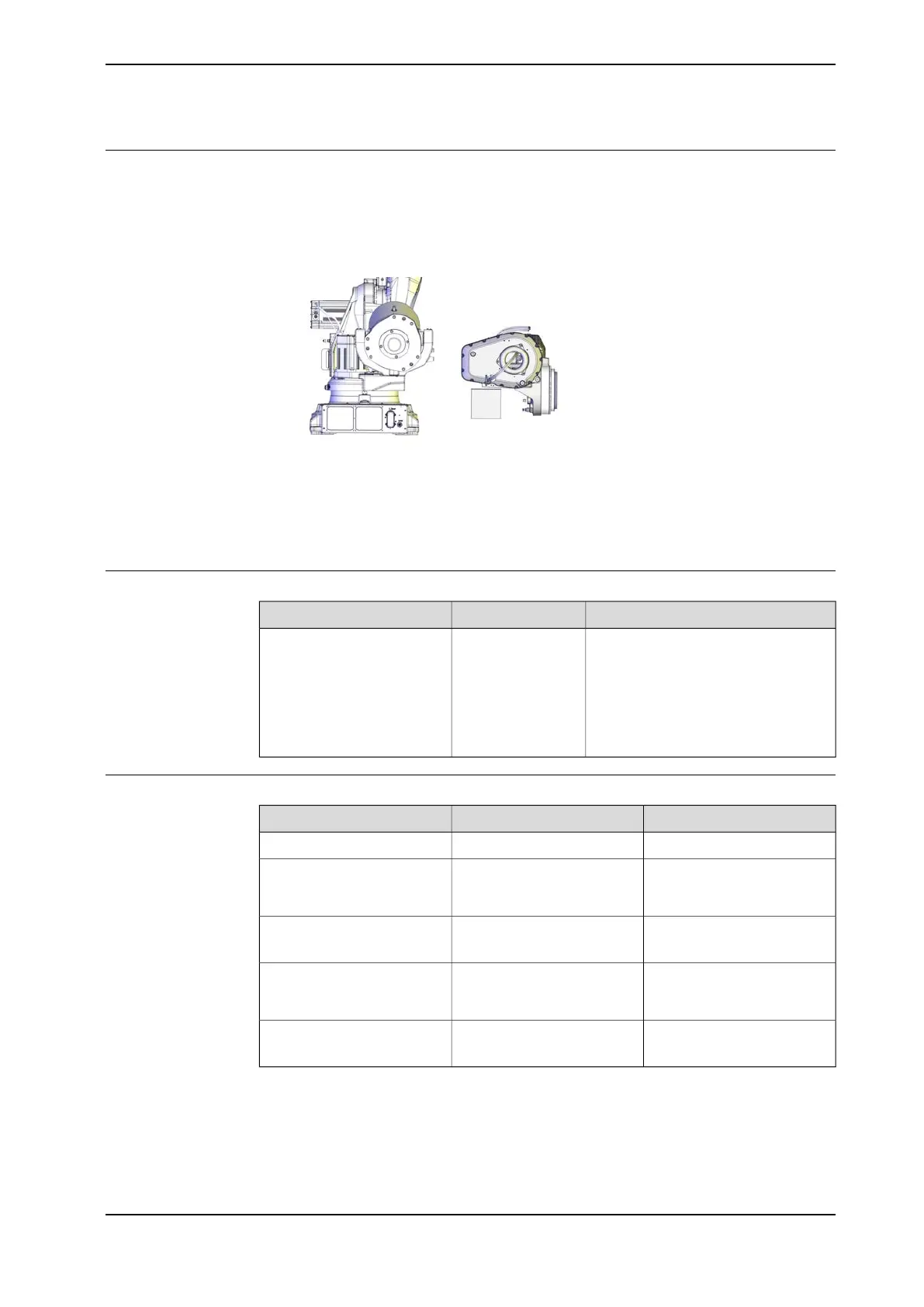
1 Remove the upper arm from the robot and position it as shown in the figure,
for easy removal of the axis-3 gearbox.
xx1300000553
When removing the upper arm, the cable harness can be kept fitted or partly
fitted to the robot. Use caution not to cause any damage to the cable harness.
2 Replace the axis-3 gearbox.
Spare parts
NoteSpare part numberSpare parts
See Product manu-
al, spare parts - IRB
6700/IRB 6700Inv.
Axis-3 gearbox
Product manual,
spare parts - IRB
6790
.
Consumables
NoteArticle numberEquipment, etc
Used to lubricate o-rings.3HAB3537-1Grease
Mercasol 3110 Waxcoat. Re-
commended drying time is
24h.
3HAC034903-001Rust preventive
D=102x33HAB3772-107O-ring
Used on motor flange.
D=169.5x33HAB3772-111 (circular pro-
file) / 3HAC054692-002
(hexagon profile)
O-ring
i
Used on motor cover.
D=266.3x3.53HAB3772-145Oring
Used on gearbox.
i
The cross-section profile is either circular or hexagon. If only ordering the o-ring, order the same
profile that is currently installed in the connection box.
Continues on next page
Product manual - IRB 6700 739
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
4 Repair
4.8.5 Replacing the axis-3 gearbox
Continued

 Loading...
Loading...





