Publication 1756-UM523F-EN-P - December 2006
ControlLogix Redundancy System Overview 15
Important Terms in a
Redundant System
Redundancy requires no additional programming and is transparent to
any devices connected over an EtherNet/IP or ControlNet network.
Redundancy uses 1757-SRM modules to maintain communication
between the pair of redundant chassis.
In a redundant system, these terms describe the relationship between
the two redundant chassis.
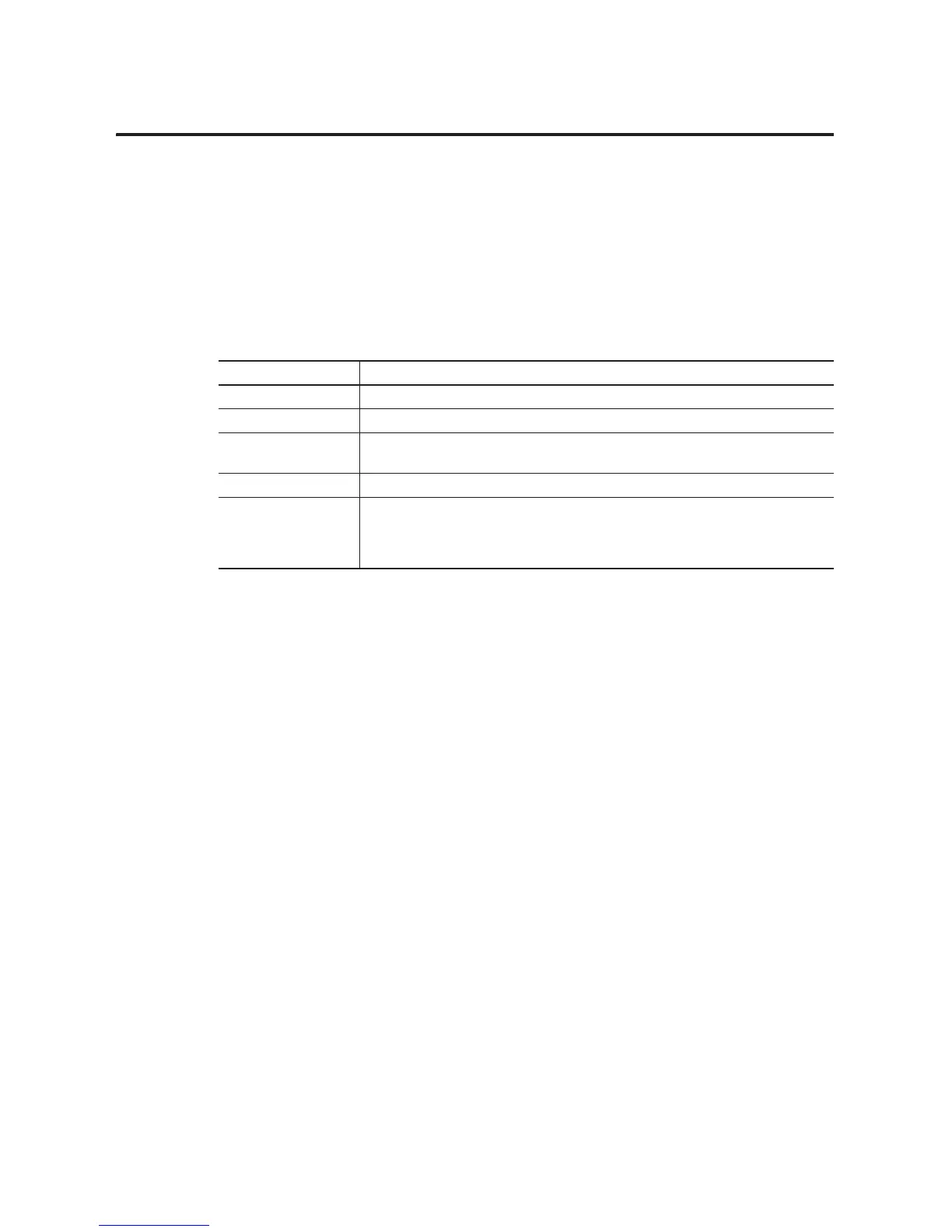
Redundancy Terms
Primary Chassis
In a pair of redundant chassis, the first chassis turned on becomes the
primary chassis. When the secondary chassis receives power, it
synchronizes itself with the primary chassis.
Switching from One
Controller to Another
When primary chassis components fail, control switches to the
secondary controller. A switchover occurs for any of these reasons:
• any of these situations in the primary chassis:
– loss of power
– major fault of the controller
– removal, insertion, or failure of any module in the primary
chassis
– break or disconnection of a ControlNet tap or ethernet cable
• command from the primary controller
• command from RSLinx software
Term Description
Primary Controller The controller that is currently controlling the machine or process.
Primary Chassis The chassis that contains the primary controller or controllers.
Secondary Controller The controller that is standing by to take control of the machine or process. A secondary
controller always resides in a different chassis than the primary controller.
Secondary Chassis The chassis that contains the secondary controller or controllers.
Switchover Transfer of control from the primary controller to the secondary controller. After a
switchover, the controller that takes control becomes the primary controller. Its partner
controller (the controller that was previously the primary controller) becomes the
secondary controller.

 Loading...
Loading...
