264 Rockwell Automation Publication 2094-UM001J-EN-P - March 2017
Appendix F Enhanced Peak Performance
Enhanced Peak Example Calculation
Based on the values shown, this is the sample calculation.
To provide safe headroom, this value needs to be reduced by 15% before being
written to the controller. This is the sample calculation.
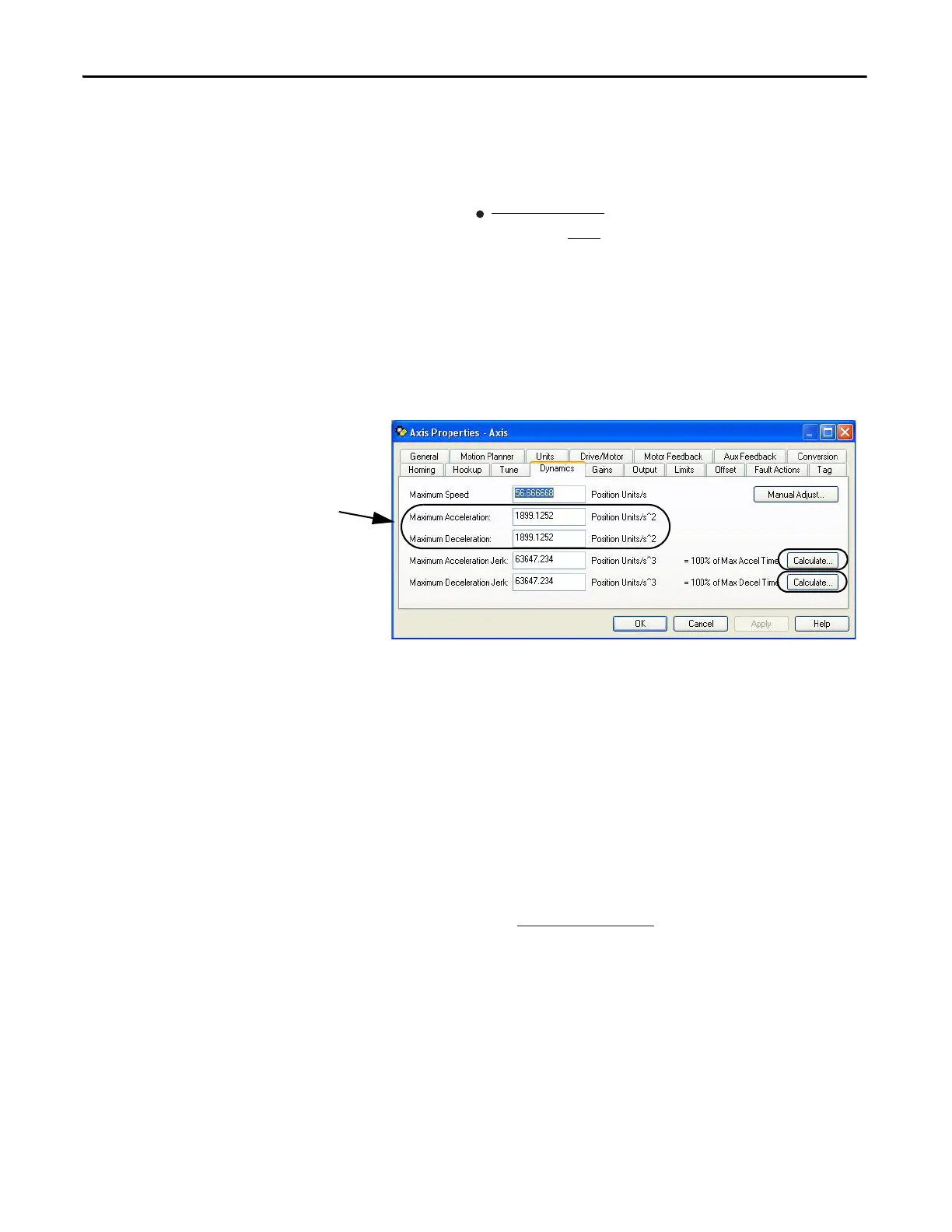
1. Click the Dynamics tab.
2. Overwrite the existing Maximum Acceleration and Maximum
Deceleration values.
In this example, the calculated values are 283.98 for each.
3. Click Calculate for the Maximum Acceleration Jerk and Maximum
Deceleration Jerk fields to automatically calculate new values.
4. Adjust the new jerk values for your specific application needs.
Setting the values for AccelerationLimitBipolar,
AccelerationLimitPositive, and AccelerationLimitNegative requires one
more calculation by using this formula.
5. Click the Limits tab.
1.781
100
Accel
max
=
0.53308904
=
334.09 PU/s
2
PU/s
2
%
rated
0.85 •
MaximumAcceleration
=
=
283.98 PU/s
2
max
MaximumDeceleration
=
Accel
Default Acceleration and Deceleration Values
-AccelerationLimitNegative
AccelerationLimitBipolar
=
=
668.18 PU/s
2
AccelerationLimitPositive
=
AccelerationLimitBipolar
=
2 • MaximumAcceleration
0.85

 Loading...
Loading...




