Rockwell Automation Publication 2094-UM001J-EN-P - March 2017 79
Connector Data and Feature Descriptions Chapter 4
Motor Feedback Specifications
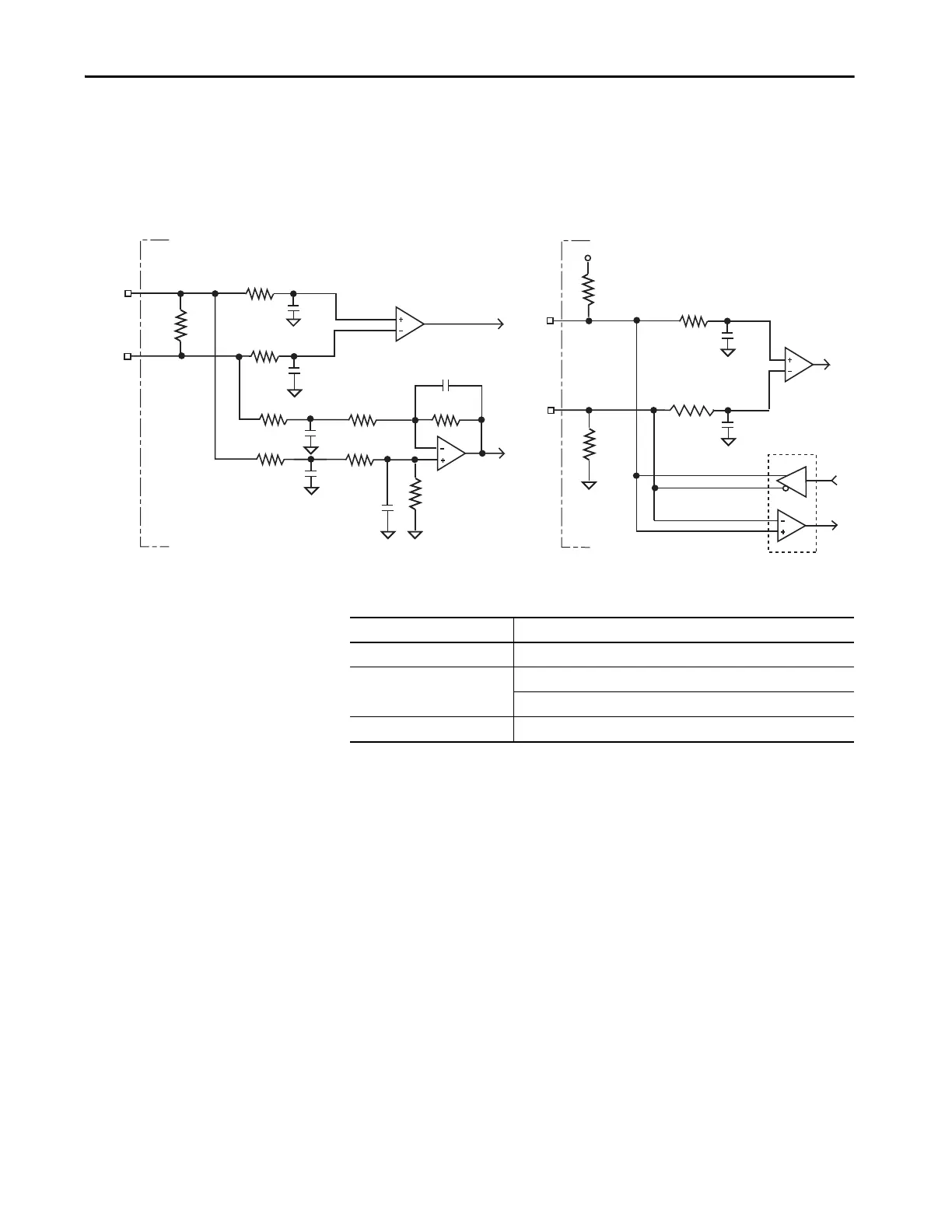
AM, BM, and IM input encoder signals are filtered by using analog and digital
filtering. The inputs also include illegal state change detection.
Figure 38 - AM, BM, and IM Motor Encoder Input Circuits
Table 52 - Motor Encoder Feedback Specifications
10k Ω
10k Ω
+5 V
1k Ω
1k Ω
+
-
56 pF
56 pF
10k Ω
1k Ω
1k Ω
10k Ω
1k Ω
1k Ω
1k Ω
1k Ω
1k Ω
100 pF
+
-
100 pF
56 pF
56 pF
56 pF
56 pF
Drive
Drive
AM and BM Channel Inputs
IM Channel Input
Attribute Value
Encoder types Incremental, A quad B, sine/cosine, intelligent, resolver, and absolute
Maximum input frequency
500 kHz (TTL input) per channel
250 kHz (sine/cosine input)
Commutation feedback Hall sensor

 Loading...
Loading...




