Chapter 6 Control Mode of Operation ASDA-A2
6-40 Revision February, 2017
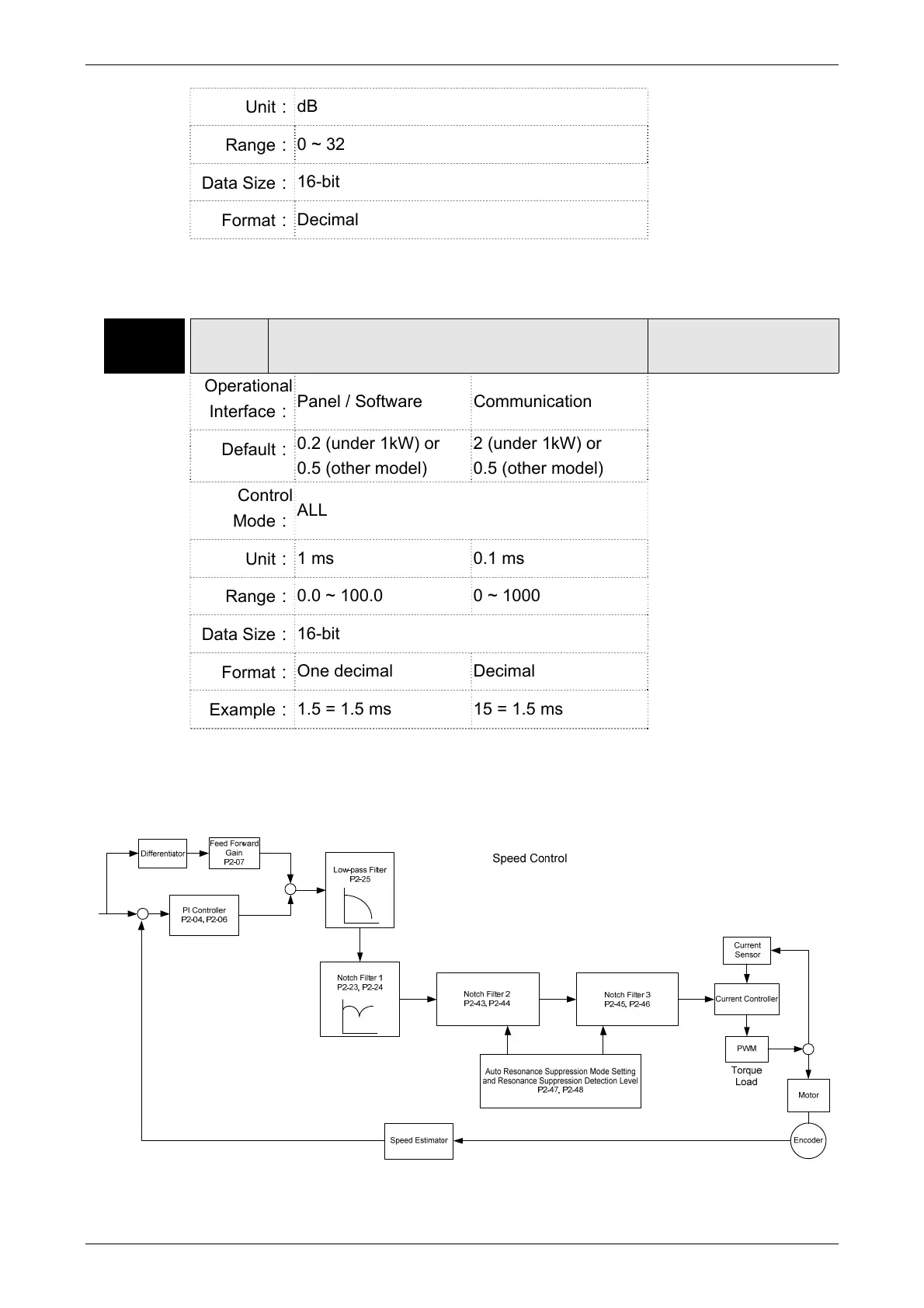
Unit:
dB
Range:
0 ~ 32
Data Size:
16-bit
Format:
Decimal
Settings:
The third group of resonance suppression (Notch filter) attenuation
rate. Set the value to 0 to disable the function of Notch filter.
P2-25 NLP Low-pass Filter of Resonance Suppression
Address: 0232H
0233H
Operational
Interface:
Panel / Software Communication
Related Section:
6.3.7
Default:
0.2 (under 1kW) or
0.5 (other model)
2 (under 1kW) or
0.5 (other model)
Control
Mode:
ALL
Unit:
1 ms 0.1 ms
Range:
0.0 ~ 100.0 0 ~ 1000
Data Size:
16-bit
Format:
One decimal Decimal
Example:
1.5 = 1.5 ms 15 = 1.5 ms
Settings:
Set the low-pass filter of resonance suppression. When the value is set
to 0, the function of low-pass filter is disabled.