T3-B T6-B Maintenance 12. Joint #4
T-B series Maintenance Manual Rev.1 97
After parts have been replaced (motors, reduction gear units, a brake, timing belts, ball screw
spline unit, etc.), the Manipulator cannot operate properly because a mismatch exists
between the origin stored in each motor and its corresponding origin stored in the Robot
system.
Because of that, it is necessary to perform calibration (encoder rest and calibration) to match
these origins.
Refer to “17. Calibration” to execute the calibration.
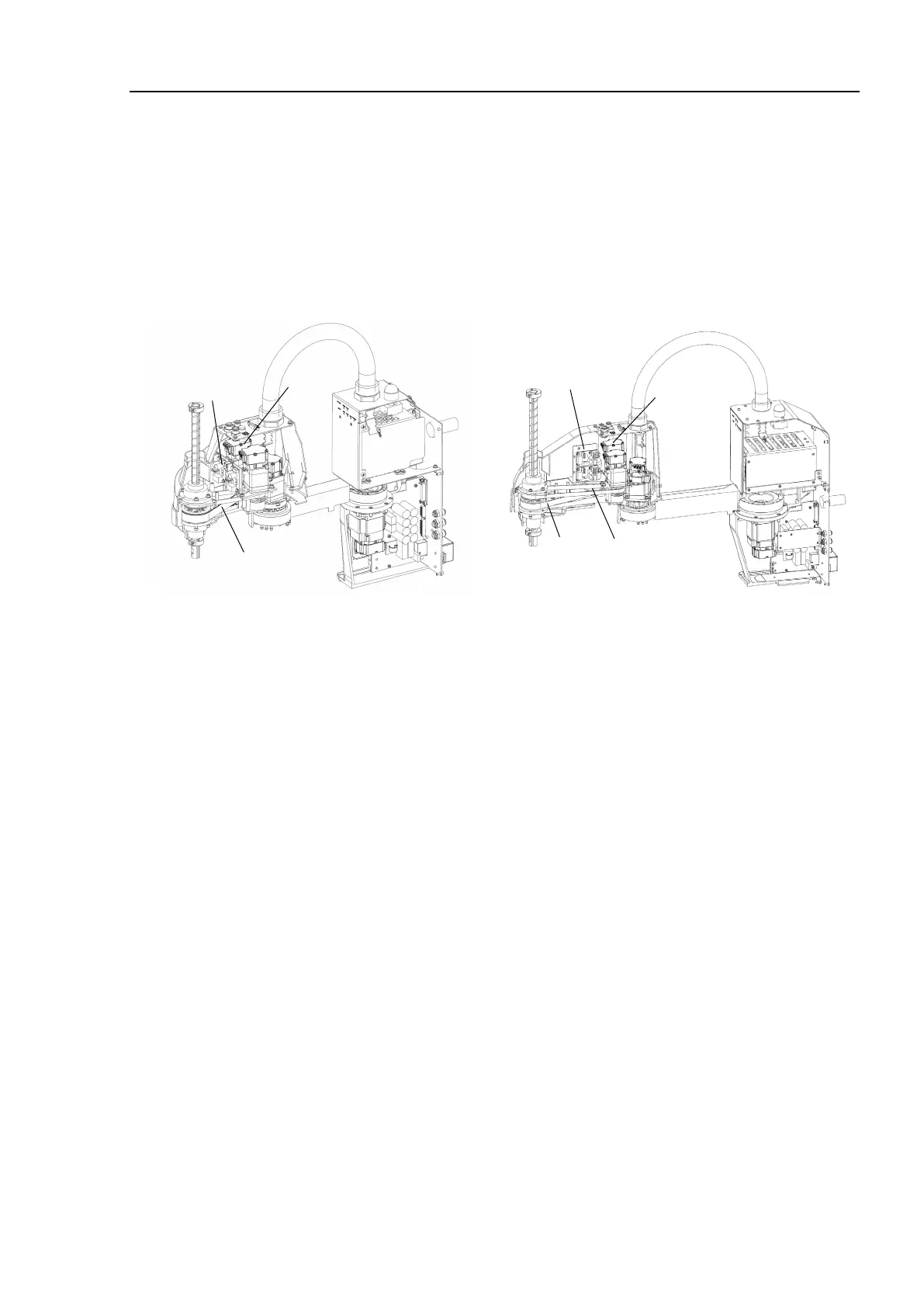
Joint #2, 3, 4 AMP
board unit
Joint #2, 3, 4 AMP
board unit
 Loading...
Loading...








