5 Troubleshooting
5
- 65 -
Function
Code
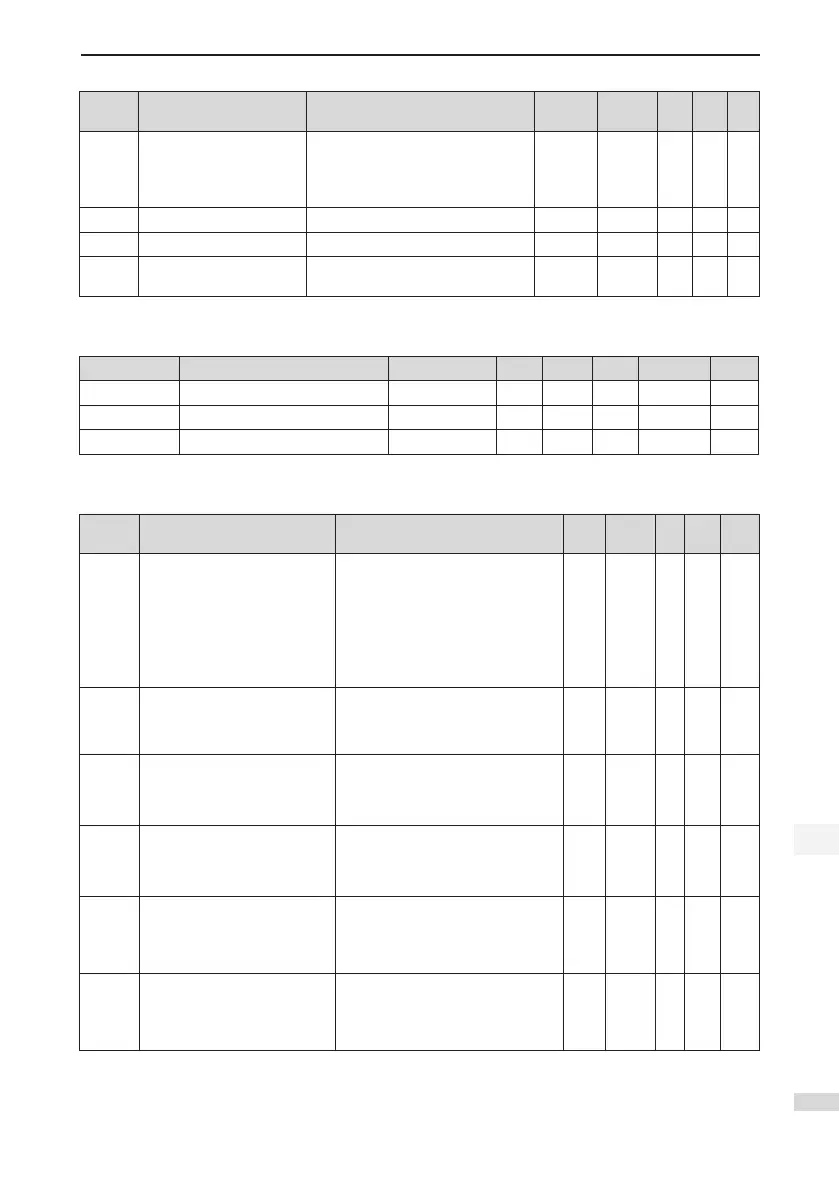
Parameter Name Setting Range Unit Default ET
Pro
CM
H00-30 Encoder selection (Hex)
Ox000: Common incremental encoder
(UVW-ABZ)
0x013: Inovance 20-bit serial encoder
1 0x013 Po
St
-
H00-31 PPR of encoder 0 to 1073741824 P/r 1048576 Po
St
-
H00-33 Electrical angle of signal Z 0.0 to 360 ° 180 Po
St
-
H00-34
Electrical angle of phase U
rise edge
0.0 to 360 ° 180 Po
St
-
Group H01: Servo Drive Parameters
Function Code Parameter Name Setting Range Unit Default ET
Pro
CM
H01-00 MCU rmware version 0 to 65535 - - -
Dp
-
H01-01 FPGA rmware version 0 to 65535 - - -
Dp
-
H01-02 Servo drive SN 0 to 65535 - - Po
St
-
Group H02: Basic Control Parameters
Function
Code
Parameter Name Setting Range Unit Default ET
Pro
CM
H02-00 Control mode selection
0: Speed mode
1: Position mode
2: Torque mode
3: Torque mode/Speed mode
4: Speed mode/Position mode
5: Torque mode/Position mode
6: Torque mode/Speed mode/Position
mode
- 1 Im
St
-
H02-01 Absolute system selection
0: Incremental position mode
1: Absolute position linear mode
2: Absolute position rotating mode
- 0 Po
St
ALL
H02-02 Rotating direction selection
0: CCW direction as forward direction
(phase A advancing phase B)
1: CW direction as forward direction
(phase A lagging phase B
- 0 Po
St
PST
H02-03 Output pulse phase
0: CCW direction as forward direction
(phase A advancing phase B)
1: CW direction as forward direction
(phase A lagging phase B)
- 0 Po
St
PST
H02-05 Stop mode at S-ON off
0: Coast to stop, keeping de-
energized state
1: Emergency stop, keeping de-
energized state
- 0 Im
St
PST
H02-06 Stop mode at NO.2 fault
0: Coast to stop, keeping de-
energized state
1: Emergency stop, keeping de-
energized state
- 0 Im
St
PST
 Loading...
Loading...