6 Parameter Table
6
- 82 -
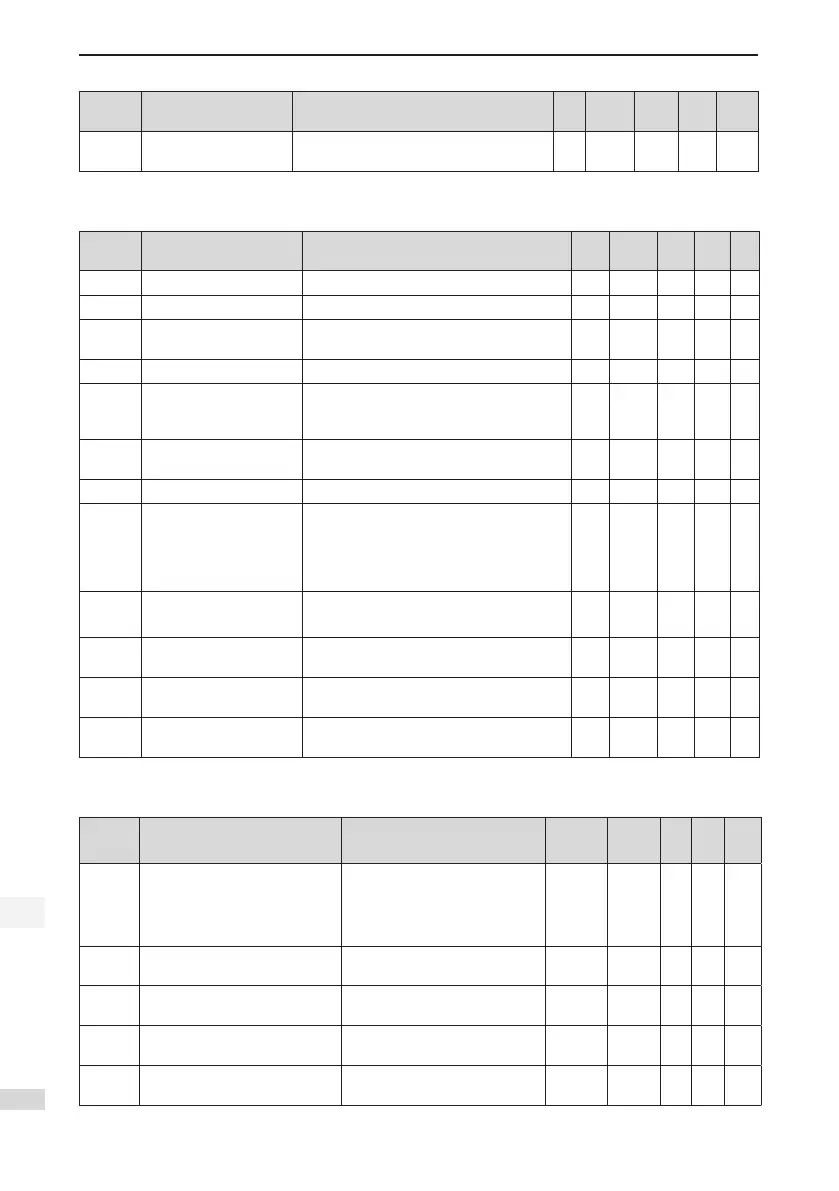
Function
Code
Parameter Name Setting Range Unit Default
ET Pro
CM
H0C-30
Modbus error frame
format
0: Old protocol; 1: New protocol (standard) 1 1
Im Ru
PST
Group H0D: Auxiliary Function Parameters
Function
Code
Parameter Name Setting Range Unit Default
ET Pro
CM
H0D-00 Software reset 0: Disabled; 1: Enabled - 0
Im St
-
H0D-01 Fault reset 0: Disabled; 1: Enabled - 0
Im St
-
H0D-02
Ofine inertia auto-tuning
enable
- - -
Im Ru
-
H0D-03 Reserved parameter - - -
- -
-
H0D-05 Emergency stop
0: Disabled
1: Enabled, stop mode determined in H02-05
- 0
Im Ru
-
H0D-10
Analog automatic
adjustment
0: Disabled; 1: AI1 adjustment; 2: AI2
adjustment
- 0
Im St
-
H0D-11 Jog function With lter - -
- -
-
H0D-17 Forced DI/DO setting
0: Disabled
1: Forced DI enabled, forced DO disabled
2: Forced DO enabled, forced DI disabled
3: Forced DI and DO enabled
- 0
Im Ru
-
H0D-18 Forced DI level 0 to 0x01FF -
0x01
FF
Im Ru
-
H0D-19 Forced DO setting 0 to 0x001F - 0
Im Ru
-
H0D-20
Absolute encoder reset
function
0: Disabled; 1: Reset faults; 2: Reset faults
and multi-turn data
- 0
Im Dp
ALL
H0D-24 Gravity load auto-tuning 0 to 1 - 0
Im Ru
Group H0F: Full Closed-Loop Parameters
Function
Code
Parameter Name Setting Range Unit Default
ET Pro
CM
H0F-00 Encoder feedback mode
0: Internal encoder feedback
1: External encoder feedback
2: Internal/External switchover at
electronic gear ratio switchover
- 0
Im St
P
H0F-01
Running direction of external
encoder
0: Standard running direction
1: Reverse running direction
- 0
Im St
P
H0F-04
External encoder pulses per one
motor revolution
0 to 1073741824 Ext enc 10000
Po St
P
H0F-08
Full closed-loop position
deviation excess threshold
0 to 1073741824 Ext enc 10000
Im Ru
P
H0F-10
Full closed-loop position
deviation clear setting
0 to 100 r 0
Im Ru
P
 Loading...
Loading...