6 Parameter Table
6
- 83 -
Function
Code
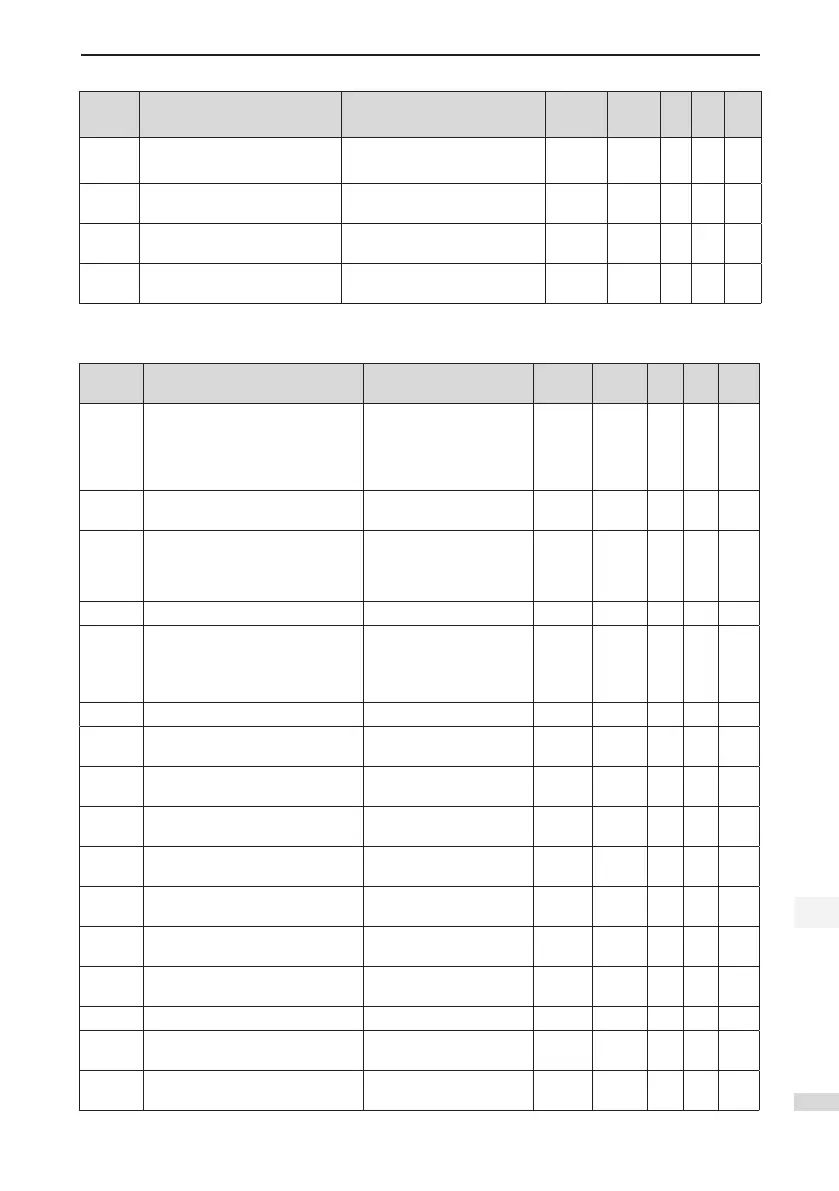
Parameter Name Setting Range Unit Default
ET Pro
CM
H0F-13
Filter time constant of hybrid
vibration suppression
0 to 6553.5 ms 0
Im Ru
P
H0F-16
Full closed-loop position
deviation counter
-1073741824 to 1073741824 Ext enc 0
- D
P
H0F-18
Feedback pulse counter of
internal encoder
-1073741824 to 1073741824 Int enc 0
- D
P
H0F-20
Feedback pulse counter of
external encoder
-1073741824 to 1073741824 Ext enc 0
- D
P
Group H11: Multi-Position Function Parameters
Function
Code
Parameter Name Setting Range Unit Default
ET Pro
CM
H11-00 Multi-position running mode
0: Stop after running single
cycle
1: Cyclic running
2: DI switchover
3: Sequential running
- 1
Im St
P
H11-01 Number of position reference prole 1 to 16 - 1
Im St
P
H11-02 Margin processing method
0: Complete the remaining
distance
1: Start running again from
1st position
- 0
Im St
P
H11-03 Time unit 0: ms; 1: s - 0
Im St
P
H11-04 Displacement reference type
0: Relative displacement
reference
1: Absolute displacement
reference
- 0
Im St
P
H11-05 Start position of sequential running 0 to 16 - 0
Im St
P
H11-12 1st displacement
-1073741824 to
1073741824
Ref 10000
Im Ru
P
H11-14
Maximum running speed of 1st
displacement
1 to 6000 RPM 200
Im Ru
P
H11-15
Acceleration/Deceleration time of
1st displacement
0 to 65535 ms (s) 10
Im Ru
P
H11-16 Waiting time after 1st displacement 0 to 10000 ms (s) 10
Im Ru
P
H11-17 2nd displacement
-1073741824 to
1073741824
Ref 10000
Im Ru
P
H11-19
Maximum running speed of 2nd
displacement
1 to 6000 RPM 200
Im Ru
P
H11-20
Acceleration/Deceleration time of
2nd displacement
0 to 65535 ms (s) 10
Im Ru
P
H11-21 Waiting time after 2nd displacement 0 to 10000 ms (s) 10
Im Ru
P
H11-22 3rd displacement
-1073741824 to
1073741824
Ref 10000
Im Ru
P
H11-24
Maximum running speed of 3rd
displacement
1 to 6000 RPM 200
Im Ru
P
 Loading...
Loading...