6 Parameter Table
6
- 70 -
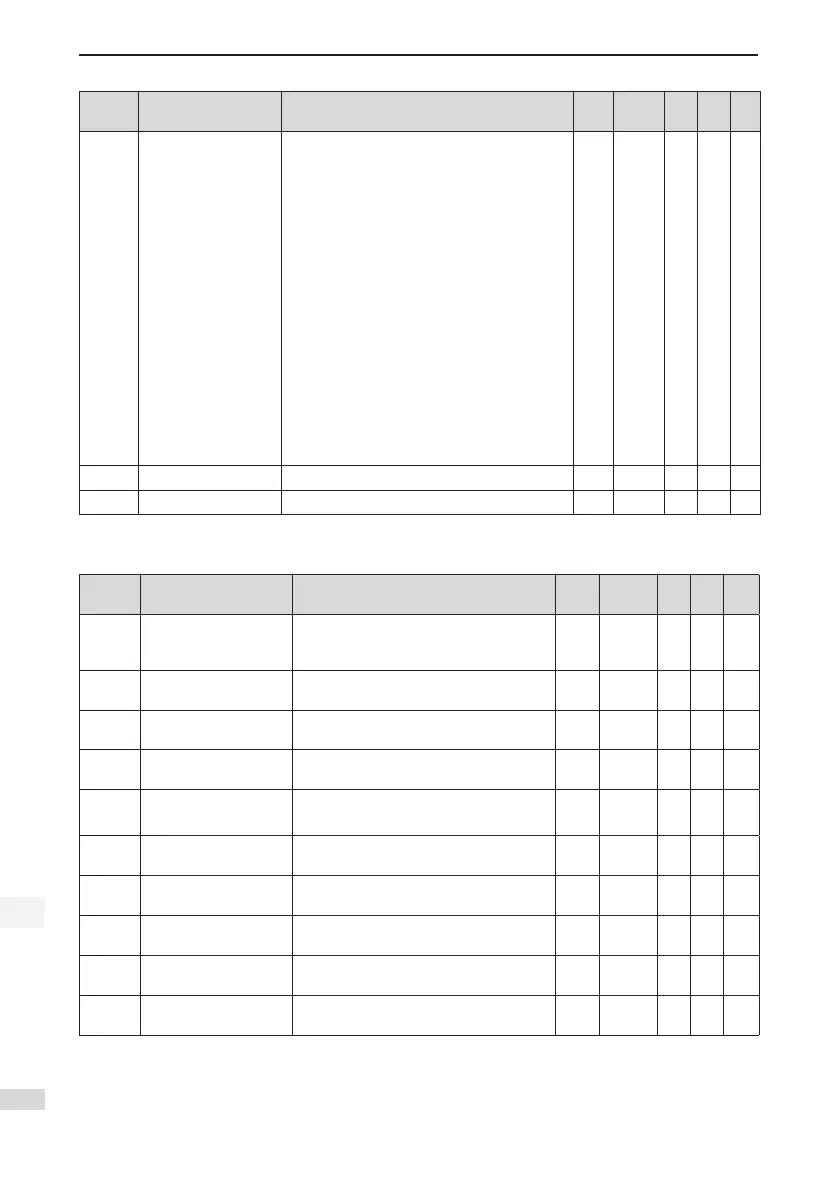
Function
Code
Parameter Name Setting Range Unit Default
ET Pro
CM
H04-53 AO2 signal selection
00: Motor speed
(1 V/1000 RPM)
01: Speed reference
(1 V/1000 RPM)
02: Torque reference
(1 V/1 time of rated motor torque)
03: Position deviation
(0.05 V/1 reference unit)
04: Position deviation
(0.05 V/Enc)
05: Position reference speed
(1 V/1000 RPM)
06: Positioning completed (positioning
completed: 5 V, positioning not completed: 0 V)
07: Speed feedforward (1 V/1000 RPM)
08: AI1voltage
09: AI2 voltage
- 0
Im Ru
-
H04-54 AO2 offset voltage -10000 to 10000 mV 5000
Im Ru
-
H04-55 AO2 multiplying factor -99.99 to 99.99 times 1.00
Im Ru
-
Group H05: Position Control Parameters
Function
Code
Parameter Name Setting Range Unit Default ET
Pro
CM
H05-00
Position reference
source
0: Pulse input
1: Step setting
2: Multi-position reference
- 0 Im
St
P
H05-01
Pulse input terminal
selection
0: Low-speed terminals
1: High-speed terminals
- 0 Im
St
P
H05-02
Pulses per one motor
revolution
0 to 1048576 P/r 0 Po
St
P
H05-04
Time constant of rst-
order low-pass lter
0 to 6553.5 ms 0.0 Im
St
P
H05-05 Step amount -9999 to 9999 Ref 50 Im
St
P
H05-06
Time constant of moving
average lter
0.0 to 128.0 ms 0.0 Im
St
P
H05-07
Electronic gear ratio 1
(numerator)
1 to 1073741824 - 1048576 Im
Ru
P
H05-09
Electronic gear ratio 1
(denominator)
1 to 1073741824 - 10000 Im
Ru
P
H05-11
Electronic gear ratio 2
(numerator)
1 to 1073741824 - 1048576 Im
Ru
P
H05-13
Electronic gear ratio 2
(denominator)
1 to 1073741824 - 10000 Im
Ru
P
 Loading...
Loading...