6 Parameter Table
6
- 76 -
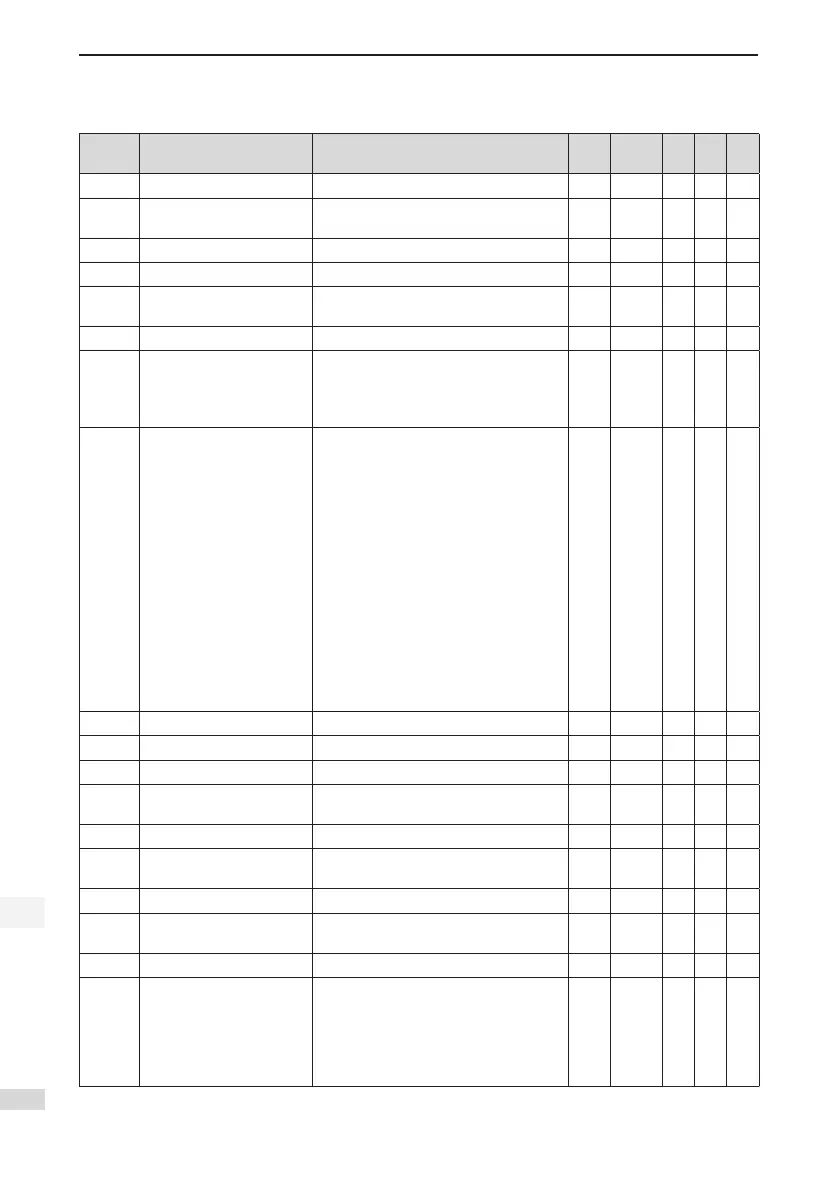
Group H08: Gain Parameters
Function
Code
Parameter Name Setting Range Unit Default
ET Pro
CM
H08-00 Speed loop gain 0.1 to 2000.0 Hz 25.0
Im Ru
PS
H08-01
Time constant of speed loop
integration
0.15 to 512.00 ms 31.83
Im Ru
PS
H08-02 Position loop gain 0.0 to 2000.0 Hz 40.0
Im Ru
P
H08-03 2nd gain of speed loop 0.1 to 2000.0 Hz 40.0
Im Ru
PS
H08-04
2nd time constant of speed
loop integration
0.15 to 512.00 ms 40.00
Im Ru
PS
H08-05 2nd gain of position loop 0.0 to 2000.0 Hz 64.0
Im Ru
P
H08-08 2nd gain mode setting
0: Always use the rst gain, P/PI switched
over via DI
1: First gain and second gain switched
over according to the setting of H08-09
- 1
Im Ru
PST
H08-09 Gain switchover condition
0: Fixed at 1st gain (PS)
1: Switched over via DI (PS)
2: Torque reference being large (PS)
3: Speed reference being large (PS)
4: Speed reference change rate being
large (PS)
5: Speed reference high-speed low-speed
thresholds (PS)
6: Position deviation being large (P)
7: Position reference available (P)
8: Positioning completed (P)
9: Motor speed being large (P)
10: Position reference available + motor
speed (P)
- 0
Im Ru
PST
H08-10 Gain switchover delay 0.0 to 1000.0 ms 5.0
Im Ru
PST
H08-11 Gain switchover level 0 to 20000 * 50
Im Ru
PST
H08-12 Gain switchover hysteresis 0 to 20000 * 30
Im Ru
PST
H08-13
Position gain switchover
time
0.0 to 1000.0 ms 3.0
Im Ru
P
H08-15 Load inertia ratio 0.00 to 120.00 Times 1.00
Im Ru
PST
H08-18
Time constant of speed
feedforward lter
0.00 to 64.00 ms 0.50
Im Ru
P
H08-19 Speed feedforward gain 0.0 to 100.0 % 0.0
Im Ru
P
H08-20
Time constant of torque
feedforward lter
0.00 to 64.00 ms 0.50
Im St
PS
H08-21 Torque feedforward gain 0.0 to 200.0 % 0.0
Im Ru
PS
H08-22 Speed feedback lter
0: Disabled
1: Mean lter of 2 speed feedbacks
2: Mean lter of 4 speed feedbacks
3: Mean lter of 8 speed feedbacks
4: Mean lter of 16 speed feedbacks
- 0
Im St
PS
 Loading...
Loading...