24 JX Quick Start Guide
PROGRAMMING JX
3.14 Carrier frequency
You can change the PWM waveform carrier frequency output from the inverter.
• With the carrier frequency set high, you can reduce metallic noise from the motor. However, this may increase electrical noise
or leakage current from the inverter.
• Carrier frequency adjustment also helps avoid mechanical or motor resonance.
• To raise the carrier frequency, reduce the output current (or derate the rated current). Check user’s manual for details.
3.15 PID function
This function enables process control such elements as flow rate, air volume, and pressure.
• To use this function, set A071 to 01.
• To switch between enable/disable via the terminal block (external signal), allocate 23 (PID enable/disable) to the desired
multi-function input. Select OFF for enable and ON for disable.
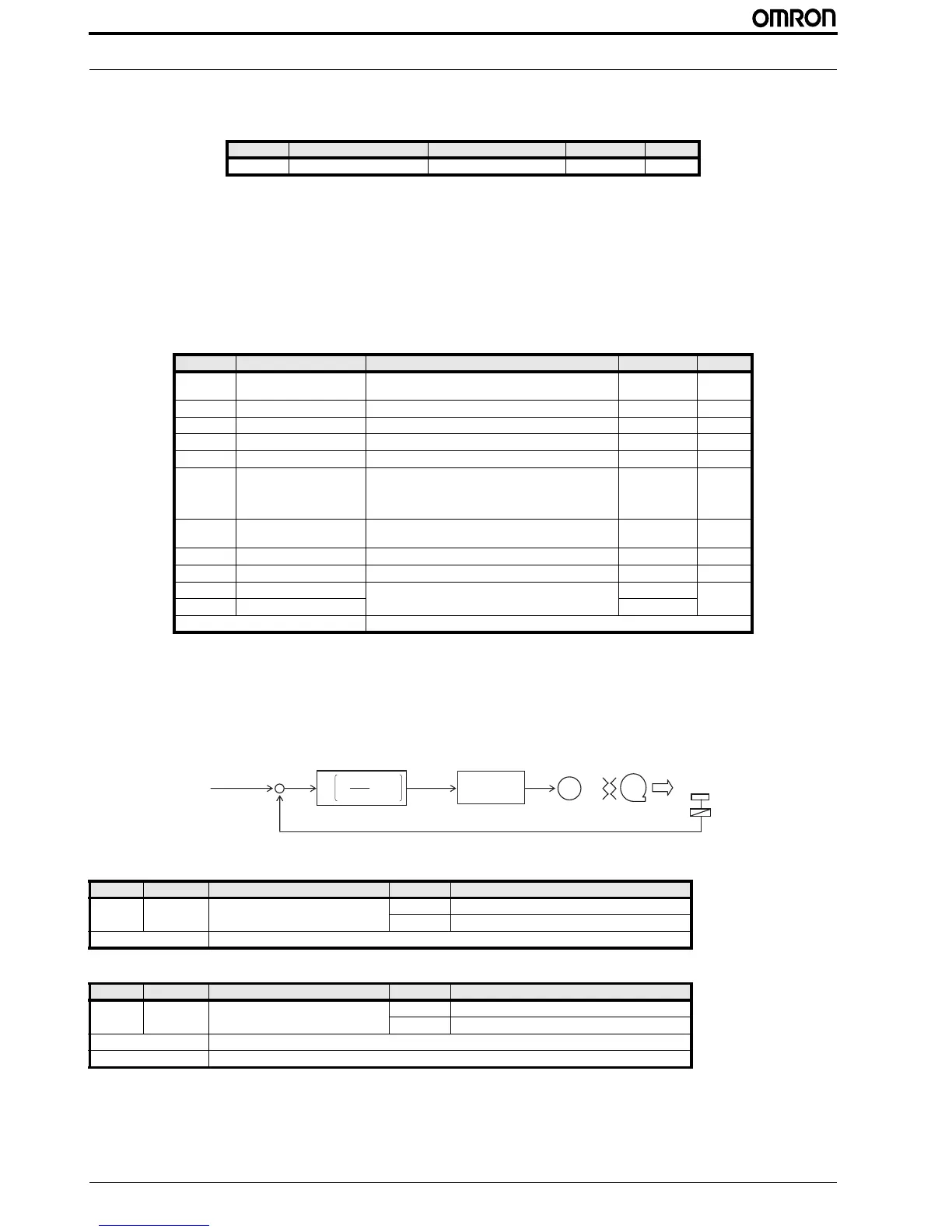
Basic structure of PID control (example)
• PID enable/disable
• Excessive deviation/output
Parameter Parameter name Data Default setting Unit
b083 Carrier frequency 2.0 to 12.0 3.0 kHz
Parameter Parameter name Data Default setting Unit
A071 PID selection 00: Disabled
01: Enabled
00 -
A072 PID P gain 0.2 to 5.0 1.0 -
A073 PID I gain 0.0 to 150.0 1.0 s
A074 PID D gain 0.00 to 100.0 0.0 s
A075 PID scale 0.01 to 99.99 1.00 Time
A076 PID feedback selection 00: OI
01: O
02: RS485 communication
10: Operation function output
00 -
A077 Reverse PID function 00: OFF (Deviation = Target value - Feedback value)
01: ON (Deviation = Feedback value - Target value)
00 -
A078 PID output limit function 0.0 to 100.0 0.0 %
C044 PID deviation excessive level 0.0 to 100.0 3.0 %
C052 PID FB upper limit 0.0 to 100.0 100.0 %
C053 PID FB lower limit 0.0
Related parameters d004, A001, A005, C001 to C005, C021, C026
Data Symbol Function name Status Description
23 PID PID enabled/disabled ON Disables the PID function
OFF Does not affect the PID function
Related parameters C001 to C005
Data Symbol Function name Status Description
04 OD Excessive PID deviation ON The PID deviation has exceeded the C044 set value
OFF The PID deviation has not reached the C044 set value
Available output terminals 11-CM2, AL2-AL0 (or AL1-AL0)
Requires settings C021, C026, C044